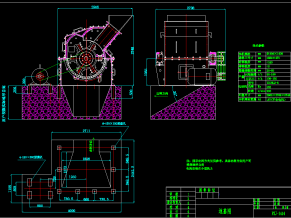
总装配图
本次设计是根据对工业六自由度机器人的总体结构及传动系统的分析和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体的结构设计,避免运动的干涉。根据工业机器人的总体结构分析可知,工业机器人的三轴的传动结构并不复杂。第一轴采用的是齿轮传动,第二轴、第三轴则采用的是摆线针轮行星齿轮传动。当然,参照以上的传动结构分析,现拟定如下三种传动方案:
方案一:第一轴:齿轮传动(直齿或斜齿)
第二轴、第三轴:摆线针轮行星齿轮传动
方案二:第一轴:蜗杆蜗轮传动
第二轴、第三轴:蜗杆蜗轮传动
方案三:第一轴:蜗杆蜗轮传动
第二轴、第三轴:摆线针轮行星齿轮传动
方案比较论证
首先,已知各种传动的传动比u:直齿圆柱齿轮传动,u≤4;斜齿轮传动,u≤6;蜗杆蜗轮传动,5≤u≤70,常用15≤u≤50;摆线针轮行星齿轮传动, 11≤u≤87(单级)。然后估算各轴的传动比,初选转速为1500r/min的原动机,则u1=1500/15=100,
u2=1500/20=75。
第一轴传动的确定:蜗杆蜗轮传动的特点:1)传动平稳,振动冲击和噪声均很小;2)传动比也较大,结构比较紧凑。而在这里采用此传动,则需要两级传动才能满足要求,蜗杆蜗轮的传动是两轴交错的,这样一来也就增加了结构的复杂性,且同时也增加了转动时的负荷;3)由于蜗杆蜗轮啮合轮齿间相对滑动速度大,使得摩擦损耗大,因而传动效率较低。因此,第一轴采用齿轮传动。要实现设计要求,如采用圆柱直齿轮传动则需要四级传动,而采用斜齿轮则需要三级就可以,并且知道在相同的条件下,采用斜齿轮传动比圆柱齿轮传动,在结构上尺寸要小得多,由此可知,采用斜齿轮传动。斜齿传动有如下优点:1)啮合性能好;2)重合度大,传动平稳;3)结构紧凑,并且在总体结构上也是合理的。
第二轴传动的确定:由各传动系统的传动比可知,第二轴的传动应该采用摆线针轮行星齿轮传动。摆线针轮行星齿轮传动有如下优点:1)传动比大。一级传动比为11~87,二级传动比为121~7569,三级传动比可达446571;2)结构紧凑、体积孝重量轻。如将摆线针轮行星减速器与同功率的两级普通圆柱齿轮减速器相比,体积可减小1/2~2/3,重量约减轻1/2~1/3以上;3)效率较高。一般效率为0.92~0.94,最高可达0.97;4)传动平稳,过载能力较大,承受冲击和振动的性能较好;5)工作可靠,寿命长。但是这种传动结构复杂,加工制造较困难。
总上所述,选择方案一为最佳。第一轴采用三级斜齿轮传动,第二、第三轴采用摆线针轮行星齿轮传动。

斜齿轮轴1

斜齿轮2
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!