

摆臂履带越障机器人的设计是SolidWorks2015绘制,另附stp通用格式。模型绘制清晰。该装置为双摆臂结构,在遇到障碍是履带摆臂可抬起模拟行走越障,在坑洼路面可用主履带行走,上方安装六轴机器人图纸内部有详细的结构设计,关键零部件均有二维图纸,欢迎下载学习希望对您以后的学习设计有所帮助。关键字;双摆臂机器人履带机器人

轴侧图

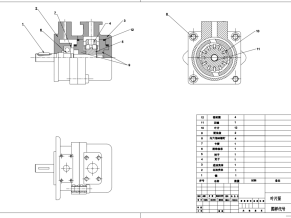
俯视图

摆臂机械臂A3-Model

摆臂壳体A2-Model

摆臂中过度轮A3-Model

电池卡板A3-Model

固定轴套A3-Model

机械臂A1-Model

空心传动轴A3-Model

上盖A3-Model

内传动轴A3-Model

箱体侧板A2-Model

圆柱齿轮79×2A3-Model

制动架组件-Model

主箱体A2-Model

总装A0-Model

行走机构

主视图

申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!



















三维SW2018带参")





