全局图
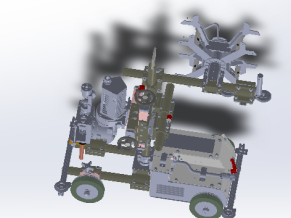
六轴机器人的六个轴,每个轴的运动范围和方向都不一样,就跟人的手臂一样,可以自由灵活的运动。下面就来介绍一个六轴的作用:
第一轴:第一轴是链接底盘的位置,也是承重和核心位置,它承载着整个机器人的重量和机器人左右水平的大幅度摆动。
第二轴:控制机器人前后摆动、伸缩的重要一轴。
第三轴:三轴也是控制机器人前后摆动的一轴,不过摆动幅度比第二轴要小很多,不过这也是六轴机器人臂展长的根据。
第四轴:四轴是控制上臂部分180°自由旋转的一轴,相当于人的小臂。
第五轴:第五轴很重要,当你差不多调好位置后,你得精准定位到产品上,就要用到第五轴,相当于人手腕部分。
第六轴:当您将第五轴定位到产品上之后,需要一些微小的改动,就需要用到第六轴,第六轴相当于可以水平360°旋转的一个转盘。可以更精确定位到产品。

第六轴

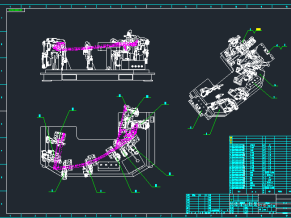
俯视图A

主视图A
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!