

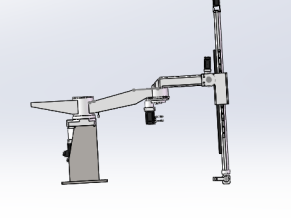
全局图
一种智能机器人手臂重力平衡装置,包括底座,所述底座外壁与防护板固定贴合,所述底座内壁与固定组件固定连接,所述固定组件下表面与平衡组件螺纹连接,所述固定组件上端与液压杆固定连接,所述液压杆外壁与机器人旋转臂焊接在一起,所述液压杆外壁上端与限位板固定贴合,且液压杆上端与压力管密封连接,所述机器人旋转臂一端外壁与转动杆固定连接,所述转动杆外壁两侧与夹板固定贴合,所述夹板内壁与固定套筒固定贴合,所述固定套筒上端外壁与配重块固定贴合,所述固定套筒下端安装有水平块,所述固定组件包括固定筒,所述固定筒内壁开设有安装孔,所述固定筒下端外壁与缓冲橡胶垫圈固定贴合,所述橡胶缓冲垫圈下表面与限位圈固定贴合,所述平衡组件包括固定底板,所述固定底板外壁与配电箱固定贴合,所述固定底板上表面与防护钢架固定连接,所述防护钢架上表面开设有固定孔。进一步优化本技术方案,所述固定筒通过限位圈套接在固定孔内壁,所述固定筒具体...

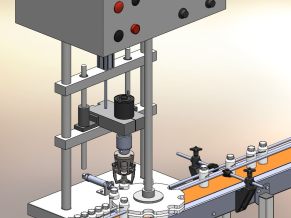
主视图

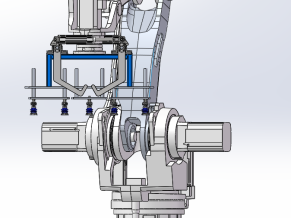
机器人手臂

图纸内容








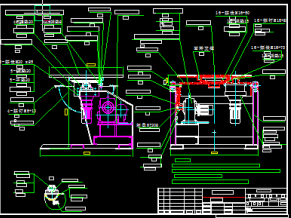







小车")






