并联机器人
并联机器人和传统工业用串联机器人在哲学上呈对立统一的关系,和串联机器人相比较,并联机器人具有以下特点:
(1)无累积误差,精度较高;
(2)驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;
(3)结构紧凑,刚度高,承载能力大;
(4)完全对称的并联机构具有较好的各向同性;
(5)工作空间较小;
根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用

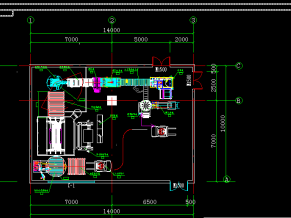
主视图

俯视图

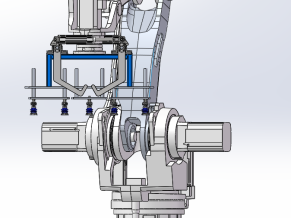
动平台

上臂
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!