

三维总装图
近年来,机器人产业的关注度越来越高,它的发展,已经上升到了国家战略的高度,各国纷纷将目光投向了机器人的创新以及应用,以求在未来的科技竞争中占据有利形势。本文首先以iRobot Braava拖地机器人为基础,介绍了服务机器人的发展历程,分析比较了市场现有的服务机器人的特点,对iRobot Braava重点和难点进行了研究。
首先是iRobot Braava拖地机器人的结构设计,拖地机器人以其小巧的体积,紧凑的结构和灵活的运动,实现了多角度多方位的清洁效果。要实现其空间交错的传动方式,本文采用的是蜗轮蜗杆结构,并着重设计了这一传动机构,并利用Pro/e软件,对其进行了结构上的三维模拟仿真。同时,分析比较了机器人常用的传感系统和定位技术,研究了iRobot Braava的GPS定位系统与路径规划技术,实现其传感信号的回路,完成其避障系统的工作过程。

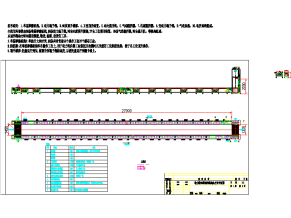
cad总装图

cad图纸结构列表

ppt

proe图纸结构列表

图纸结构

图纸目录
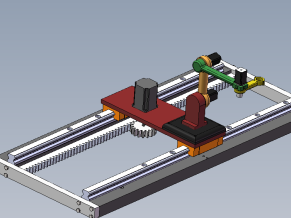







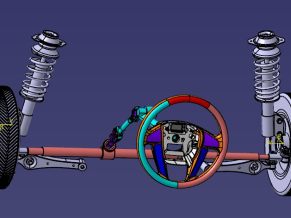














Pro/E三维模型Pro/E三维模型")

