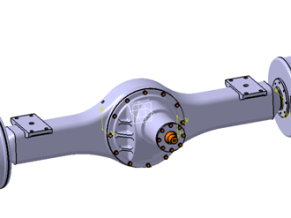
三维图
机器人3自由度自动点焊非常适合用于柔性包装流水线,大大缩短了包装周期时间。体积孝速度快,配有全套辅助设备(从集成式空气与信号系统至抓料器)。可配套使用包装软件,机械方面集成简单,编程更是十分方便。从效率上说,3自由度自动点焊器人不仅能承担高负重,而且速度和质量远远高于人工。设计的手臂考虑到工作要求不高,负荷量也少,所以在设计中最优先的同步电机驱动轴电动机选择第二,那个底盘动力大马达,第二轴力的最初的选择的马达选择的第3轴力比前两个比较小马达,压铸底盘,想模し底盘一定沉重,否则可能会翻车,整个机器臂板金,一是考虑的钣金加工简单,成本低,可塑性强,轴的位置固定,选择用轴承固定轴承的部件用车床加工。关于用轨道数控铣床。设计时第1轴底盘才3个齿轮减速,两个但是空间和想不允许,4 : 1:降速,最初和第2共计4 : 1减速作用,第二第三的配合从1对1转空间为目的的。然后第三个齿轮一些螺丝洞,固定电话。第二轴轴固定底盘转盘上,选择了,小轴承为轴,驱动被使用了的最初的齿轮固定电机直接上升第二的手臂固定齿轮,达到3:降速。第三部分和第二轴肘轴和同样的原理只有齿轮设计上,采用的是3 : 2的减速配合。极限方案1:正是距离极限开关,即极限位置触发马达电源开关后。极限方案2:终于传感器控制,本设计中比较适合的是光耦传感器,即红外线发射信号,物体的运动到极限位置发射极接收机的信号传感器接收后传控制器、电动机的停止转动。极限方案三:采用的是硬性限制和挡板冲突限制,机器臂运动距离手其构造限制,手臂的运动服结构位置前,其自动停止,必须让。简单方便考虑本设计直接那个方案。

1齿轮轴-Model

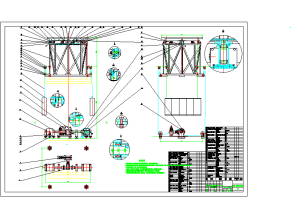
3自由度自动点焊机器人1-Model

3自由度自动点焊机器人-Model

齿轮-Model

齿条-Model

导轨-Model

基板-Model

程序总体结构-Model

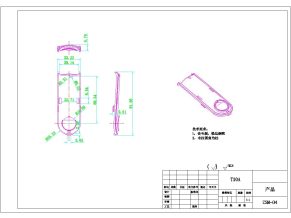
机械手模型-Model

控制面板-Model

手动程序-Model

顺序功能图-Model

自动程序-Model