

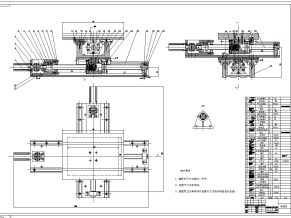
A0 总图-Model
本文介绍的机器人发展历史,机器人在国内外的应用,提出了具体的机器人设计要求和总体方案设计的不同程度的具体结构设计,以及计算的自由度和各个数据;
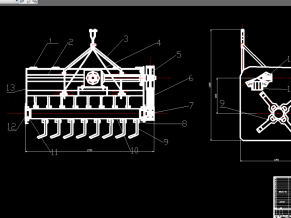
在分析了目前国内外智能移动机器人技术研究现状的基础上,本文提出了一种新的设计――自行走式物料搬运机器人。电机通过几个简单的驱动机构驱动,使机器人能够在一个方向的步态得以实现。在与车轮的运动相结合,机器人不仅具有一般的轮式机器人动作快,控制简单的功能,而且还具有良好的克服障碍功能。在本文中,对这种新型的移动机器人进行了分析。
本研究内容摘要:
(1)自行走式物料搬运机器人总体结构设计。
(2)自行走式物料搬运机器人工作性能分析。
(3)电动机的选择。
(4)对自行走式物料搬运机器人的传动系统、执行部件及机架设计。
(5)对设计零件进行设计计算分析和校核。
(6)运用计算机辅助设计,对设计的零件进行CAD绘图。
(7)绘制整机装配图及重要部件装配图和设计零件的零件图。

A3 车轮-Model

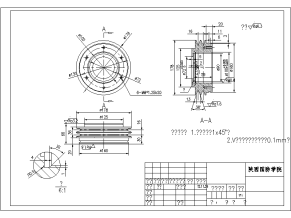
A3 电机壳-Model

A3 端盖-Model

A4 齿轮(二)-Model

A4 齿轮(一)-Model

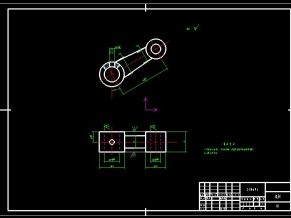
A4 机械手指-Model

A4 左右螺旋轴-Model

目录1

目录2
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!


















CAD图纸+说明书")

PT28%CAD图纸+说明书")
