

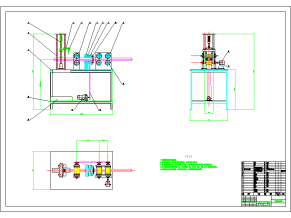
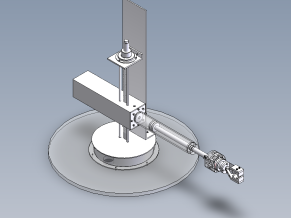
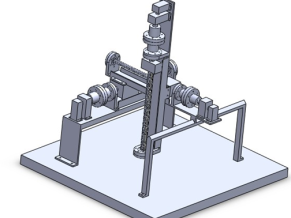
总图
机器人是典型的机电一体化产品,工业搬运机器人是研究的一个热点领域。研究多关节型机器人,在机械,电子,信息理论,人工智能,生物学和计算机的知识中,需要大量的其它专业方面的组合,以及其自身的发展,这些领域的发展才能得到促进。
在本文中,并完成工业搬运机器人图纸和通用部分绘制装配图在设计时使用。完善的电机和机器人动力学必要的分析模型来估算选择,扭矩和功率要求。第二,从电动机和齿轮箱连接固定出发,配合联合的结构和设计,从机构的连接强度中得到检查验证。

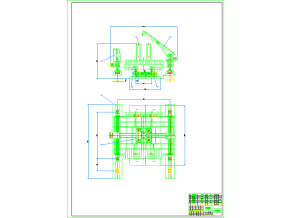
大臂关节组件

低速级大齿轮

电气控制原理图

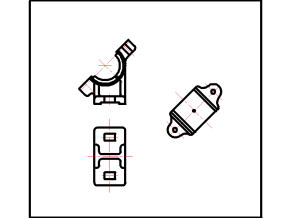
刚 轮

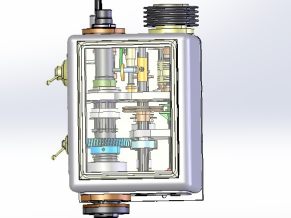
机身系统

机身箱体

柔 轮

输 出 轴

说明书2

说明书3

支撑板

中间轴












CAD图纸+说明书")
PT28%CAD图纸+说明书")





