

垂直多关节机器人
机器人既有人对环境的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。如今,机器人工业已成为世界各国备受关注的产业。
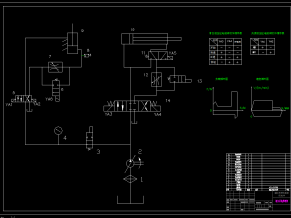
本课题设计的垂直多关节机器人的臂系统设计,介绍了机器人的结构组成,确定了基本技术参数,驱动系统,手臂配置形式,电动机的选择,小臂部件的结构设计及计算绘图以及减速器的造型等等方面内容来完成此次设计。

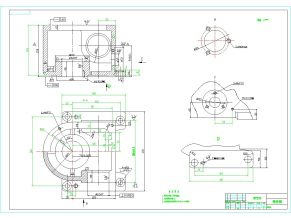
大臂板

大臂电机轴

大臂系统

电机轴

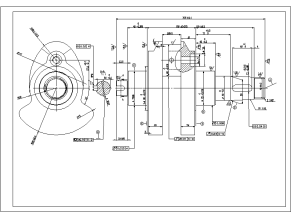
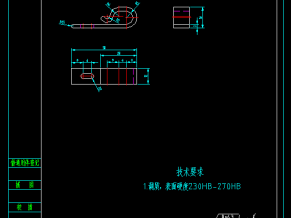
刚轮

偏心套筒

柔 轮

输出轴

输入轴

小臂板

小臂关节组件

小臂系统
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!













CAD图纸+说明书")






