

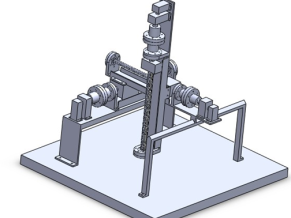
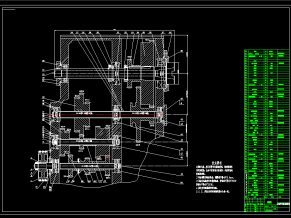
总图
本文在简单介绍玻璃清洁机器人的国内外研究现状的基础上,基软件CAD对四轮式风压吸附玻璃清洁机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体玻璃,避免了清晰机器人对壁面的局限,降低了控制难度;擦洗机主要由伺服悬吊系统、擦洗主机和由计算机控制系统组成;采用无人化擦洗,自动擦洗,自动供水,自动供擦洗液,单片机系统控制,操作人员只需通过键盘即可操纵擦洗机工作,而且在擦洗过程中,擦洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直玻璃直线行走。本机的擦洗效率较高,擦洗效果良好。

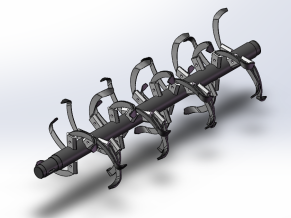
传动轴

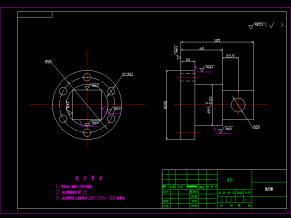
大V带轮

大圆柱齿轮

说明书2

说明书3

丝 杠

箱盖

箱体

小圆柱齿轮

小锥齿轮


















CAD图纸+说明书")

PT28%CAD图纸+说明书")

