

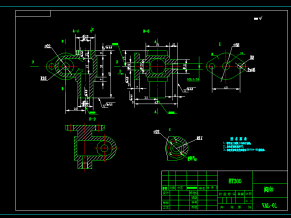
总装配图 A0-Model
本设计采用模块化设计,以便根据要求选择和定制配置,并在需要的时候方便更换和添加其他模块,而且给出了两种移动方式的设计方案,即履带式移动方式和轮式的设计,两者都有各自的特点,但主要以研究设计履带式为主,它具有良好的机动性,在越障、跨沟、攀爬方面具有明显优势。该机器人的最大优点是具有良好的越障性能、环境适应性能、防摔抗冲击性能并具备全地形通过能力。而轮式探测机器人则机动性能比较好。除了设计探测机器人的总体结构外,还给出了移动控制方案。
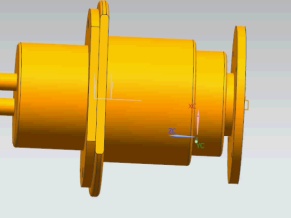
机器人最重要的机构是运动底盘的设计,即使软件设计的再好,移动方式没有设计好,那么机器人也不会很好的执行任务。轮式,腿式,履带式的移动方式在设计过程中已经给出,
可以根据自己设计的要求进行选择如果地形比较平缓,或是有沟壑的地形,可以选择履带的移动方式;如果是平缓没有沟壑的地形,就选用轮式的移动方式;如果地形成阶梯状,而且地形比较复杂,最好选用腿式的方法。
本设计可以采用两种控制系统,即通过上位机直接通过总线对机器人进行控制或是通过无线电台对机器人进行控制。

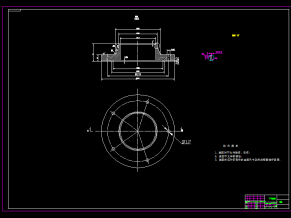
履带装配 A1-Model

电路图A1-Model

电气图

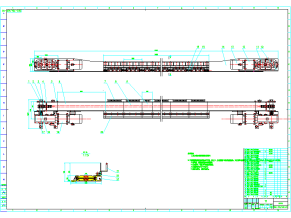
行走机构A0-Model

目录

设计文件明细表

文章首页













CAD图纸+说明书")

PT28%CAD图纸+说明书")




