

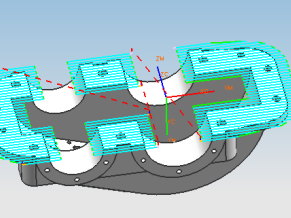
三维截图
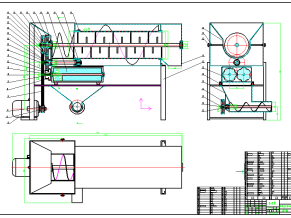
本文将设计多自由度同步仿形工艺雕刻机换刀机械手,主要的功用就是自动换刀。首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;换刀机械手技术是机电一体化产品,换刀换刀机械手成为一个领先的研究课题。运用在不同领域,其发展的多机构衔接所需组合也促成了这些学科的发展。
本文采用在结构设计上的多自由度同步仿形工艺雕刻机换刀机械手,并完成图纸和零件图总装配图。为换刀机械手模型的要求被分析以估计电机的负载,充分的设得所需要的转矩和功率。完成换刀机械手的程序设计,总体设计,结构设计,运动学模型分析,检查,分析换刀机械手模型,设计和生产换刀机械手模型做的过程中强度的关键部件,绘制3D图。

大臂关节组件

低速级大齿轮

电机轴,轴承盖,小齿轮

刚 轮

后盖

活动手爪

活动手爪固定座

机身

机身箱体

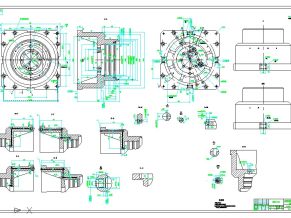
夹持装置装配图

柔 轮

输 出 轴

目录1

目录2

支撑板

中间轴

总图

![后托架[831001] 2-钻三杠孔夹具](http://img.jixie5.com/d/file/2019/01/10/edfc325af5a4c868328ca18f3fbeb241.png@!l)













")





