

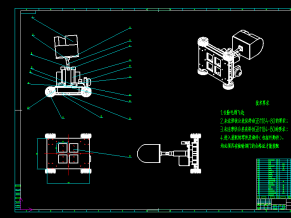
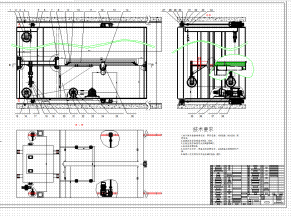
机械手机身装配图
始数据:
技术指标:自由度: 4
抓举重量: 7kg及以上
动力源:液压
对象:盘类零件
种类:加工、搬运、装配等场合应用的各类机械手
技术要求
主要参数的确定:
a、坐标形式:直角坐标系
b、臂的运动行程:伸缩运动500mm,回转运动180。
c、运动速度:使生产率满足生产纲领的要求即可。
d、控制方式:起止设定位置。
e、定位精度:±0.5mm。
f、手指握力:392N
g、驱动方式:液压驱动。

活塞

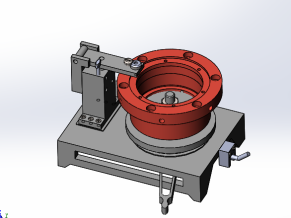
机械手外观图

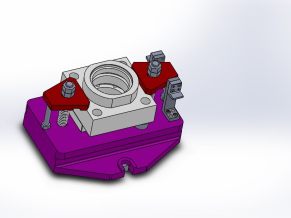
机械手爪装配图

手臂部装配体

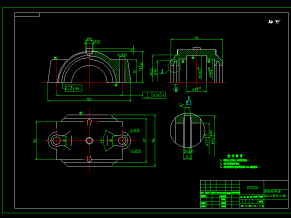
手腕部装配体

液压系统图

目录
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!


















")
")
5轴机械手含三维仿真+SolidWorks三维模型CAD图纸+说明书")
