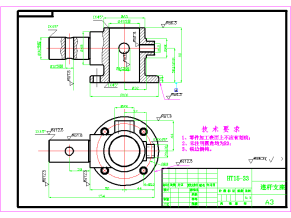
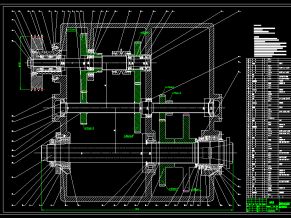
机械手总装配图
机器人是机械化和生产过程中,以夹持自动化设备的自动化和移动工件功能用途发展的一个新途径。该机器人可以替代人类,危险的工作来完成繁琐的重复,减少提高劳动生产率,人力劳动强度。该装置涉及的位置控制可编程控制技术,检测技术。开发该材料可带入爬行空间对象,操作灵活理解,改变参数,你可以根据随时的工作流程和运动需求的变化在高温下有害代替手工操作。一种利用蠕变纸在手取料机械设计结构设计,以及完整的图纸和零件图总装配图的方法。要求机器人的力学分析模型,扭矩和功率必要的联合估计,完成液压元件及发动机的选择。

ug电机

导向套

后端盖

活塞

活塞杆

机械手手爪装配图

前端盖

说明书3

液压缸

液压系统图

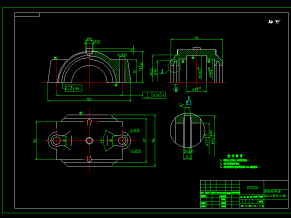
长方法兰
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!