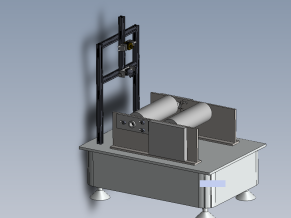
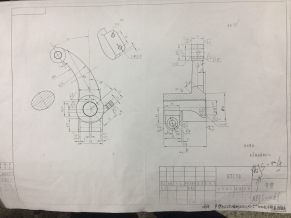
总装图
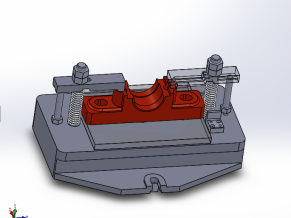
本文总结了国内外仿生蜘蛛机器人的背景和目标,仿生蜘蛛机器人的研究成果和简单介绍。介绍了蜘蛛的运动原理和设计的大概思路。通过研究蜘蛛机器人的六足仿生的运动,这种设计已确定脚结构,使用3自由度的分析实现向前运动,经过计算和模拟确定了方案的可行性。通过计算选择了电机的种类和型号。完成了各个零件型号以及种类的选择。构想的组件和装配仿生蜘蛛机器人以及相关部件的检查,确保机械设计的可行性,都包含在总设计。
cad图预览
关节夹片
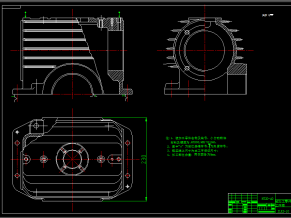
机器头
机身板
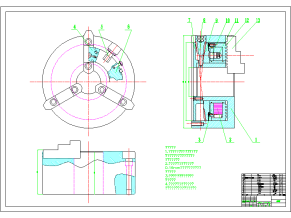
基节片
径节片
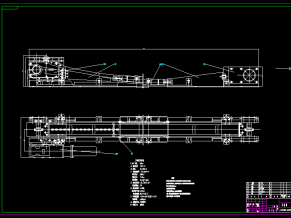
连杆杆
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: