

PLC外部接线图
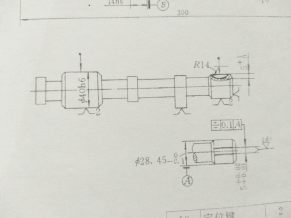
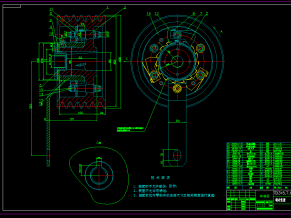
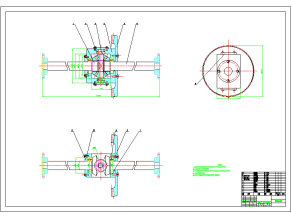
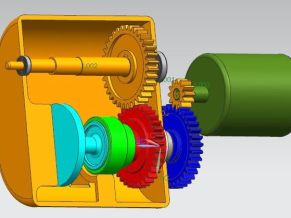
搬运机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。搬运机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。本文介绍的搬运机械手是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制搬运机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制搬运机械手手爪的张合,从而实现搬运机械手精确运动的功能。本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
本文在纵观了近年来搬运机械手发展状况的基础上,结合搬运机械手方面的设计,对搬运机械手技术进行了系统的分析,提出了用驱动和PLC控制的设计方案。采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。对搬运机械手的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。在其驱动系统中采用驱动,控制系统中选择PLC的控制单元来完成系统功能的初始化、搬运机械手的移动、故障报警等功能。最后提出了一种简单、易于实现、理论意义明确的控制策略。
通过以上部分的工作,得出了经济型、实用型、高可靠型搬运机械手的设计方案,对其他经济型PLC控制系统的设计也有一定的借鉴价值。

初始化及报警程序

手动程序

说明书2

说明书3

状态转移图

自动程序梯形图

总程序结构框图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!



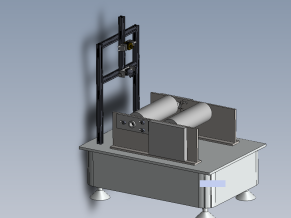

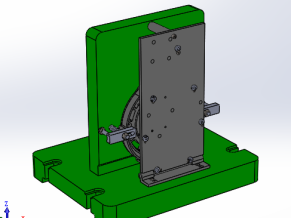






5轴机械手含三维仿真+SolidWorks三维模型CAD图纸+说明书")







