三维图
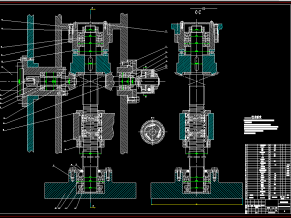
移动机械手是用于处置或销毁爆可疑、危险物品的专用器材,避免不必要的人员伤亡。它可用于多种复杂地形进行移动。此设计的移动机械手可实现回转、上下移动,夹持并且能过坑、越障等动作。
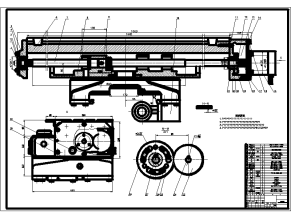
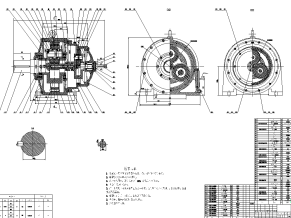
此设计移动方案的选择是采用了履带式驱动结构,而手臂部分则采用关节式机构。结构整体使用模块化设计,以便后续拆卸维修,可以适应于各种复杂的路面,并可主动控制两侧摇臂的转动来调节机器人的运动姿态,从而达到辅助过坑、越障等动作。经过合理的设计后机器人将具有很好的环境适应能力、机动能力并能承受一定的掉落冲击,此设计的移动机构主要由四部分组成:电机的选择、主履带设计、副履带设计、臂部及手腕设计。
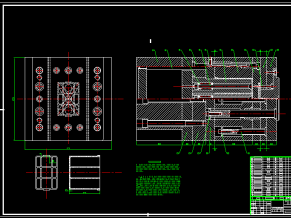
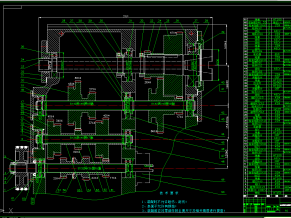
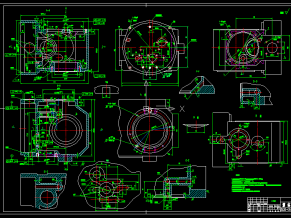
本文首先根据课题所给的技术参数和功能要求提出移动机械手车体结构方案,并对方案进行分析。接着,对主要技术参数进行了计算选择;然后,对各主要零部件进行了设计与校核;最后,通过AutoCAD制图软件绘制了移动机械手车体结构装配图及主要零部件图。

车轮轴-Model

齿轮-Model

大臂-A2-Model

电机座-A2-Model

回转轴-Model

手臂支座-Model

摇臂-A2-Model

装配图-A0-Model
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!