

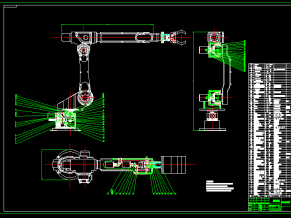
机械手装配图-Model
机械手是一种在机械化和自动化过程中开发的新型装置。机械手可以代替人工,重复无聊完成危险工作,提高劳动生产率,减轻劳动强度。该设备涵盖了位置控制技术,可编程控制技术,检测技术等。本项目拟研制抓料物料,可将抓物放入空间,动作灵活,根据要求变化和运动过程中的工件受题目改变参数,而不是在高风险操作区域手动操作。本文研制的机械手是一种在机械化和自动化过程中开发的新型装置。机械手可以代替人工,重复无聊完成危险工作,提高劳动生产率,减轻劳动强度。该设备涵盖了位置控制技术,可编程控制技术,检测技术等。本项目拟研制抓料物料,可将抓物放入空间,动作灵活,根据要求变化和运动过程中的工件受题目改变参数,而不是在高风险操作区域手动操作。本文在回收装置抓取机械设计的结构设计中应用,完成装配图和零件图的绘制。需要进行机械分析来估计每个接头的扭矩和功率,并选择液压元件和PLC。
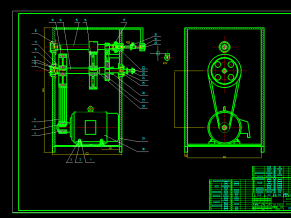
通过对机械电子专业所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计一种圆柱坐标形式的PLC控制的机床上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了机械手的整体设计,要做结构的设计,机械手手臂结构的设计,机械手腕部的结构设计,末端执行器的结构设计。机械手的机械传动的设计,机械手驱动系统的设计。同时对液压系统和控制系统进行了理论分析和计算。基于PLC对机械手的控制系统进行了深入细致的设计,通过对机械手作业的工艺过程和控制要求的分析,设计了控制系统的硬件电路。同时编制了机械手的控制程序,设计达到了设计的预期目标。

PLC控制机械手电气图-Model

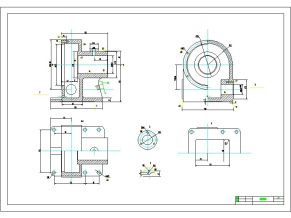
后端盖零件图-Model

液压缸二级装配图-Model

液压缸活塞杆导向套-Model

液压系统图-Model

长方法兰零件图-Model

目录1

目录2
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
















")




