

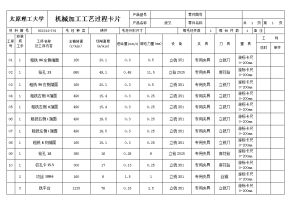
A0 自动换刀机械手
这项研究的内容是立式加工中心换刀装置的设计,机器人的延伸和人的手,脚和大脑的扩展,它可以是相当重的,单调,重复,提高用户的工作效率,保证生产质量的基矗和机器人技术和在手的领域深化进程的快速发展,不仅需要控制自己的高可靠性,高利用变化和操作上的改变都不错,而且它的成本低廉,可以开发出强大的经济。
是指机器人手可以复制手臂的某些程序和服务用于夹持固定或拒绝自动工具从工作的处理。
机器人可以代替人工工作,比如生产过程的要求可能遵循一定的程序,时间和地点,完成铁的递送和管理。它可以在空间,在那里,有什么等处理,交换局被抓,被广泛应用于工业生产等领域。不仅提升产量,而且需保障人身,改善工作条件,减少工作时间表,具有重大意义。

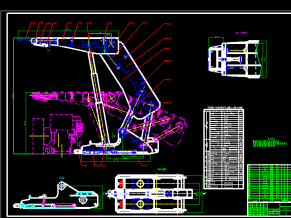
A1 大臂关节组件

A1 底座部装图

A1 底座箱体

A2 后盖

A2 活动手爪固定座

A2 夹持装置装配图

A3 低速级大齿轮

A3 活动手爪

A3 输出轴

A3 支撑板

A3 中间轴

A4 电机轴

A4 小齿轮

A4 轴承盖

说明书目录2

说明书字数和目录





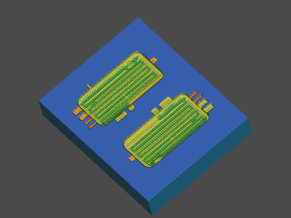
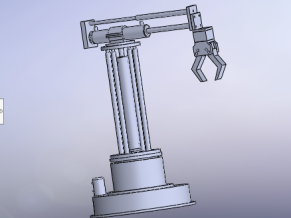
















SolidWorks三维模型")
