

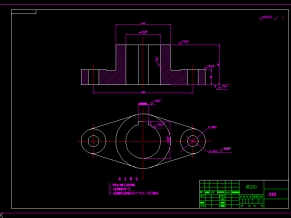
总装配
随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。尤其在工业方面,工业机械手是近30年发展起来的一种典型的、机电一体化的自动化生产工具。在制造工业中,应用工业机器人技术是提高生产过程自动化,改善劳动条件,提高产品质量和生产效率的有效手段之一,也是新技术革命的一个重要内容。
本设计了一款仿形车床上料机械手,首先对运动功能进行了设计,该机械手拥有三个自由度:手部的平动,由手部的夹紧油缸实现,腕部的转动由腕部的摆动油缸实现,以及臂部的回转由齿轮机构实现。对传动功能进行设计:总体选用液压驱动,机械手驱动压力为。对机械结构进行设计:满足强度和刚度情况下,充分考虑了机械手的结构紧凑、重量轻、体积小等特点。同时满足装卸方便,便于维修的特点。
本课题是一个机械、液压紧密的实用性项目,文中重点是对机械手机械结构的设计、传动方案的设计,其次是对液压系统的设计。最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键词:机械手;仿形车床;自由度;

底座

空心主轴

立柱

小齿轮

液压原理图

轴承端盖

轴套

轴套2

锥形套

_doc_2

开题报告_doc_1

中期报告_doc_1























")

