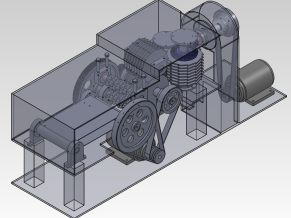
三维模型
本次设计的题目是抓斗式液压机械手。液压机械手的主要特点为:能无级调速且调速范围大,能得到较低的稳定转速,快速作用时,液压元件产生的运动惯性小,加速性能好,并可作高速反转,传动平稳,结构简单,可吸收冲击和振动,操纵省力,易实现自动化控制,易于实现标准化、系列化、通用化。 本次设计的主要参数是抓取力300kg,它属于小型液压机械手,主要设计机械手的工作装置。
护板
活塞杆
液压缸
斗杆连接板
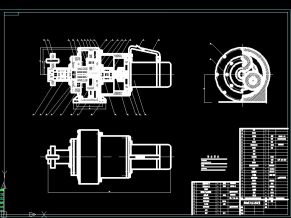
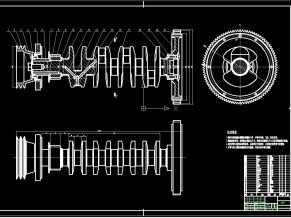
总装图
液压系统
字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:























")

")




![[A0043]液压钢筋弯曲机液压系统的设计【word+6张CAD图纸全套】](http://img.jixie5.com/d/file/2019/07/08/ee8b876d0f1976f341bbc372f140e333.jpg@!l "[A0043]液压钢筋弯曲机液压系统的设计【word+6张CAD图纸全套】")
")
