Ш§ЮЌФЃаЭ
БОПЮЬтНЋЩшМЦвЛИіЫФздгЩЖШЛњаЕЪжЃЌЦфжаЃЌШ§ИівЦЖЏздгЩЖШЃЌашЭъГЩXЁЂYЁЂZШ§ЮЌПеМфФкЕФвЦЖЏвЊЧѓЃЌСэЭтвЛИіа§зЊздгЩЖШЃЌЭъГЩЛњЦїШЫЕФа§зЊдЫЖЏвЊЧѓЁЃЫќФмЪЕЯжЦНУцдЫЖЏЃЌОпгаШсЫГадЃЌШЋБлдкДЙжБЗНЯђЕФИеЖШДѓЃЌдкЫЎЦНЗНЯђЕФШсадДѓЃЌЙуЗКгУгкзАХфзївЕжаЁЃ

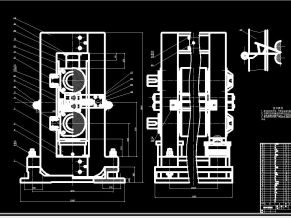
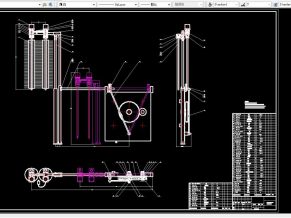
ФЉЖЫжДааЛњЙЙФЃаЭ

ЙіжщЫПИм

ЕчЛњЕзАх

ЛЌЙьЕззљ

Щ§НЕБлСЌНгМў

ЫПИмТнФИзљ

жсГазљ

змзАЭМ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ