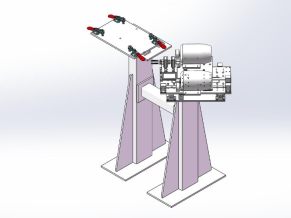
三维模型
本课题研究的内容是一个圆柱坐标型工业机器人的研究与设计,其工作场合是在某一企业的生产线上,有左右两条输送带,相距1米5,本次设计的机械手主要功能就是将某个产品从一条输送带放置到另一条输送带上。
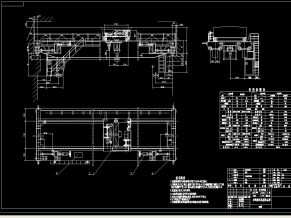
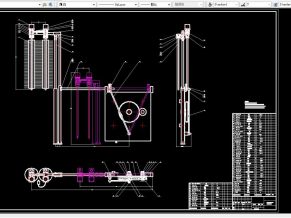
总装图
工作空间图
机构简图
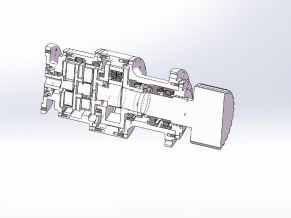
导向套
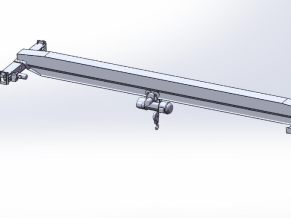
末端执行器
支架
支座
转动壳体
目录及字数
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:























")
")

")


")


