

三维模型
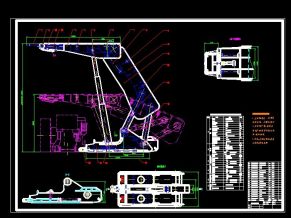
本文采用理论分析的方法,推导了考虑初始预紧力的索传动静态模型和动力模型中力与位移的输入输出关系。主要推导了驱动中三个死区的表达式,并通过表达式讨论了影响电缆驱动特性的因素。
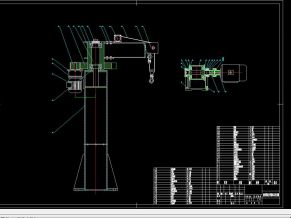
为了论证激光驱动技术在狭小空间搜救机器人中应用的可行性,设计了一种直线运动、偏转、俯仰、滚动、夹紧五自由度搜救机器人,并对机器人的正反向运动学进行了讨论。
通过所设计的控制系统,说明了该机器人具有吊索传动的优点。设计的张紧机构在预紧力差的情况下,可以在一定程度上减小传动误差。

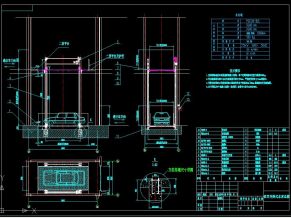
传动部件视图

总装图

安装板

舵轮

偏转部分

输出轴

移动部分图

座

目录及字数














")
")
")
")
")

")
")
")