

змзАХфЭМ
дкЕБНёДѓЙцФЃжЦдьвЕжаЃЌЦѓвЕЮЊЬсИпЩњВњаЇТЪЃЌБЃеЯВњЦЗжЪСПЃЌЦеБщжиЪгЩњВњЙ§ГЬЕФздЖЏЛЏГЬЖШЃЌЙЄвЕЛњЦїШЫзїЮЊздЖЏЛЏЩњВњЯпЩЯЕФживЊГЩдБЃЌж№НЅБЛЦѓвЕЫљШЯЭЌВЂВЩгУЁЃЙЄвЕЛњЦїШЫЕФММЪѕЫЎЦНКЭгІгУГЬЖШдквЛЖЈГЬЖШЩЯЗДгГСЫвЛИіЙњМвЙЄвЕздЖЏЛЏЕФЫЎЦНЃЌФПЧАЃЌЙЄвЕЛњЦїШЫжївЊГаЕЃзХКИНгЁЂХчЭПЁЂАсдЫвдМАЖбЖтЕШжиИДадВЂЧвРЭЖЏЧПЖШМЋДѓЕФЙЄзїЃЌЙЄзїЗНЪНвЛАуВЩШЁЪОНЬдйЯжЕФЗНЪНЁЃ
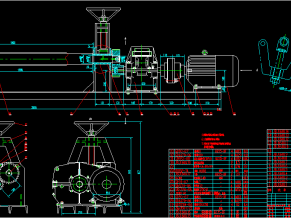
БОЮФНЋЩшМЦвЛЬЈЫФздгЩЖШЕФЙЄвЕЛњЦїШЫЃЌгУгкИјГхбЙЩшБИдЫЫЭЮяСЯЁЃЪзЯШЃЌБОЮФНЋЩшМЦЛњЦїШЫЕФЕззљЁЂДѓБлЁЂаЁБлКЭЛњаЕЪжЕФНсЙЙЃЌШЛКѓбЁдёКЯЪЪЕФДЋЖЏЗНЪНЁЂЧ§ЖЏЗНЪНЃЌДюНЈЛњЦїШЫЕФНсЙЙЦНЬЈЃЛдкДЫЛљДЁЩЯЃЌБОЮФНЋЩшМЦИУЛњЦїШЫЕФПижЦЯЕЭГЃЌАќРЈЪ§ОнВЩМЏПЈКЭЫХЗўЗХДѓЦїЕФбЁдёЁЂЗДРЁЗНЪНКЭЗДРЁдЊМўЕФбЁдёЁЂЖЫзгАхЕчТЗЕФЩшМЦвдМАПижЦШэМўЕФЩшМЦЃЌжиЕуМгЧППижЦШэМўЕФПЩППадКЭЛњЦїШЫдЫааЙ§ГЬЕФАВШЋадЃЌзюжеЪЕЯжЕФФПБъАќРЈЃКЙиНкЕФЫХЗўПижЦКЭжЦЖЏЮЪЬтЁЂЪЕЪБМрВтЛњЦїШЫЕФИїИіЙиНкЕФдЫЖЏЧщПіЁЂЛњЦїШЫЕФЪОНЬБрГЬКЭдкЯпаоИФГЬађЁЂЩшжУВЮПМЕуКЭЛиВЮПМЕуЁЃ

ДѓБл

Еззљ

Еззљ0

ЛњаЕЪжжЇзљ

ЛњаЕЪжзАХф

зАХфЭМ

аЁБлA2
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ




















")



