ХӘТӘ
ЛжЧЕИ«№ъИЛҝЪҪб№№өДАПБд»ҜЈ¬№ъДЪөДОЮХП°ӯЙиК©ФЪЦрҪҘФц¶аЈ¬К№өГіэЦ«МеЙЛІРХЯНвөДҙу¶аКэДкАПМеИхХЯТІ¶јФёТвСЎФсВЦТОЧчОӘЛыГЗөДҙъІҪ№ӨҫЯЈ¬ВЦТОөДУҰУГКРіЎТІХэФЪВэВэА©ҙуЎЈө«№ъДЪіЗКРДҝЗ°КЗТФ¶аІг№«ФўКҪёЯВҘҫУ¶аЈ¬ФЪ·ўХ№ҪПІоөДТ»Р©ЦРРЎіЗКРЦРЈ¬өзМЭөДК№УГЙхЦБ¶ј»№ОҙНкИ«ЖХј°өҪЛщУРВҘ·ҝЈ¬ХвҫНөјЦВБЛВЦТОУГ»§ЙПВҘІ»·ҪұгөДПөБРОКМвЎЈұҫЧЕВЦТОК№УГУГ»§өДМеСйР§№ыЈ¬ОӘБЛҪвҫцВЦТОУГ»§ЕАВҘДСөДХвТ»ОКМвЎЈұҫҝОМвЙијЖөДЧоЦХДҝөДКЗОӘБЛЙијЖіцТ»ҝоМе»эІ»ҙуЎўІЩЧчҪПОӘјтөҘЎўјЫёсККЦРөДЛ«ЗэІо¶ҜҝШЦЖөДРРРЗВЦКҪЕАВҘМЭВЦТОЎЈФЪУГ»§өДМеСйЙПЈ¬»№ФцјУБЛВЦТОөДјхХрөҜ»ЙЎўҝҝұіУлНИНРөДҝЙөчҪЪТФј°·цКЦөДЦГОпјЬөИЙијЖЎЈұҫОДЦчТӘНкіЙЙППВВҘМЭ»ъ№№Ј¬ЖҪөШРРЧЯ»ъ№№ТФј°БҪХЯЦ®јдөДУР»ъҪбәПөДСРҫҝУлЙијЖЎЈ
№ШјьҙКЈәУГ»§МеСйЈ»РРРЗВЦЈ»Ҫб№№ЙијЖЈ»ЕАВҘМЭВЦТО
Abstract
With the increase of the national aging population and the gradual increase of barrier-free facilities in China, most elderly and infirm people, except those with physical disabilities, are willing to choose wheelchairs as their transportation tools, and the application market of wheelchairs is also gradually increasing. However, domestic cities are currently dominated by multi-storey apartment buildings, and in some small and medium-sized cities with poor development, the use of elevators has not even been fully popularized to all buildings, which leads to a series of problems of inconvenient upstairs for wheelchair users. In line with the user experience of wheelchair, in order to solve the problem of wheelchair users difficult to climb the building. The ultimate goal of this project is to design a small volume, simple operation, affordable dual drive differential control of planetary wheel climbing wheelchair. In terms of user experience, shock absorber spring of wheelchair, adjustable backrest and leg support, and shelving frame of armrest are also added. This paper mainly completes the up and down stairs mechanism, flat walking mechanism and the organic combination between the research and design.
Key words: User experience; Planetary Wheel; structural Design; Stair wheelchair
ДҝВј
ХӘТӘI
Abstract II
ДҝВјi
өЪТ»ХВРчВЫ1
1.1СЎМвұіҫ°ј°СРҫҝТвТе1
1.2СЎМвСРҫҝПЦЧҙ1
1.2.1ВДҙшКҪЕАВҘМЭВЦТО1
1.2.2ВЦЧйКҪЕАВҘМЭВЦТО2
1.2.3ІҪРРКҪЕАВҘМЭВЦТО2
1.3ЦчТӘСРҫҝДЪИЭ3
өЪ¶юХВЕАВҘВЦТОөД№ӨЧчФӯАнј°ЧЬМе·Ҫ°ёЙијЖ4
2.1»щұҫёЕКц4
2.2ЕАВҘМЭВЦТОөД№ӨЧч»ъ№№ЙијЖ4
2.2.1ЕКЕА»ъ№№ЙијЖ4
2.2.2РРРЗВЦёцКэөДИ·¶Ё5
2.3ЕКЕАЗэ¶ҜЧ°ЦГөДҙ«¶ҜЙијЖ6
2.3.1ҙ«¶Ҝ·ҪКҪөДСЎФс6
2.3.2ҙ«¶ҜЙијЖ6
2.4¶ҜБҰПөНіЙијЖ8
2.4.1өз»ъСЎРН8
2.4.2өз»ъІОКэөДСЎФс9
2.4.3өзФҙСЎФс11
өЪИэХВЕАВҘВЦТОөДҪб№№ЙијЖ12
3.1 SolidworksИнјюҪйЙЬ12
3.2РРРЗВЦПөөДПа№ШІОКэЙијЖ12
3.2.1·ӯФҪМЁҪЧөДјёәОФјКшМхјю13
3.2.2іЭВЦЦ®јдөДіЭКэ№ШПө15
3.2.3іөВЦУліөВЦЦ®јдөДјёәО№ШПө15
3.2.4ёчБгјюЙијЖІОКэөД·¶О§іхСЎ16
3.2.5ЧоЦХІОКэИ·¶Ё17
3.3РРРЗВЦПөҪб№№Іҝ·ЦөДКөМеҪЁДЈ17
3.4ҙ«¶ҜІҝ·ЦПа№ШІОКэЙијЖ20
3.4.1ЕАВҘДЈКҪПВөДІОКэЙијЖ20
3.4.2ЖҪөШРРЧЯДЈКҪПВөДІОКэЙијЖ23
3.5ҙ«¶ҜІҝ·ЦБгјюКөМеҪЁДЈ26
3.6ЧщТОҪб№№өДЙијЖј°ҪЁДЈ29
3.6.1ЧщТОөДХыМеНвРОіЯҙзЙијЖ29
3.6.2·цКЦёЁЦъҪб№№ЙијЖ30
3.6.3ҝҝұіөДҝЙөчҪЪ»ъ№№ЙијЖ31
3.6.4НИНРөДҝЙөчҪЪ»ъ№№ЙијЖ32
өЪЛДХВХыМеЧ°Ед35
4.1ЕАВҘМЭВЦТОөДХыМеЧ°Ед35
өЪОеХВҪбВЫУлХ№Ны38
5.1ҪбВЫ38
5.2Х№Ны38
ІОҝјОДПЧ40
ЦВР»41
өЪТ»ХВРчВЫ
1.1СЎМвұіҫ°ј°СРҫҝТвТе
ЛжЧЕИ«№ъАПБдИЛҝЪөДФц¶аЈ¬№ъДЪөДОЮХП°ӯЙиК©ТІЦрІҪФц¶аЈ¬К№өГіэЦ«МеЙЛІРХЯНвөДҙу¶аКэДкАПМеИхХЯТІ¶јФёТвСЎФсВЦТОЧчОӘЛыГЗөДЈ¬ВЦТОөДУҰУГКРіЎВэВэА©ҙуЎЈВЦТОөДАаРНТІҙУҙ«НіөДКЦ¶ҜВЦТОЎўөз¶ҜВЦТОЦрІҪПтЦЗДЬРНөД·ҪПт·ўХ№Ј¬¶ФВЦТОөДТӘЗуТІІ»ФЩЦ»КЗЖҪөШРРЧЯЈ¬»№ТӘҫЯұёУРЕАВҘФҪХПөД№ҰДЬЎЈө«№ъДЪіЗКРДҝЗ°КЗТФ¶аІг№«ФўКҪёЯВҘҫУ¶аЈ¬ФЪ·ўХ№ҪПІоөДТ»Р©ЦРРЎіЗКРЦРЈ¬өзМЭөДК№УГЙхЦБ¶ј»№ОҙНкИ«ЖХј°өҪЛщУРВҘ·ҝЈ¬ХвөјЦВБЛВЦТОУГ»§ЙПВҘІ»·ҪұгөДПөБРОКМвЈ¬К№өГөДК№УГКЬөҪБЛәЬҙуөДЎЈ
ОӘБЛҪвҫцВЦТОУГ»§ЕАВҘДСөДХвТ»ОКМвЈ¬ҙЩК№ИЛГЗЖИЗРөДПлТӘСРҫҝіцТ»ҝоЦЗДЬРНөДВЦТОЈ¬ДЬ№»ККУҰІ»Н¬өДөШРОЎЈДҝЗ°ОӘЦ№Ј¬№ъДЪНв¶ФВЦТОАаРНөДСРҫҝҪб№ыУРәЬ¶аЈ¬ө«ИФИ»»№Г»УРМе»эРЎЎўІЩЧчјтөҘЎўјЫёсөНЗТККУГУЪ№гҙуЦ«МеЙЛІРХЯј°ДкАПМеИхХЯөДЕАВҘМЭВЦТОЎЈҫЎ№Ь№ъНвПЦУРөИХвЦЦЦЗДЬРН¶а№ҰДЬВЦТОЈ¬ОТ№ъ№ъјТјЖ»®өИЛщЦ§іЦөДТ»Р©Па№ШөҘО»ТІСР·ўіцБЛЎўУпТфј°УпТфҝШЦЖөИ№ҰДЬөДЦЗДЬРНВЦТОЎЈө«КЗЈ¬Из№ыТӘҙУОТ№ъөДҫӯјГ·ўХ№Л®ЖҪіц·ўЈ¬ёщҫЭРиЗуИЛҝЪөДҫӯјГЧҙҝцАҙҝҙЈ¬СРҫҝіцТ»ҝојЫёсәПАнЎўЦШБҝЗбЗЙЎўФЛ¶ҜБй»оөДЕКЕАЧ°ЦГИҙҫЯУРёьЦШТӘөДТвТеәНКөУГјЫЦөЎЈ




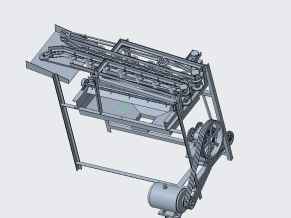
A0-РРРЗВЦҙ«¶ҜІҝ·ЦЧ°ЕдНј

A3-ЦРРДіЭВЦЦб

A3-Зэ¶ҜіЭВЦЦб

A3-РРРЗјЬНвҝЗ1

A4-№э¶ЙіЭВЦЦб
ЙкГчЈәДЪИЭАҙЧФУГ»§ЙПҙ«Ј¬ЦшЧчИЁ№йФӯЧчХЯЛщУРЈ¬ИзЙжј°ЗЦИЁОКМвЈ¬ЗлУлОТГЗБӘПөЈ¬ОТГЗҪ«ј°КұҙҰАнЈЎ