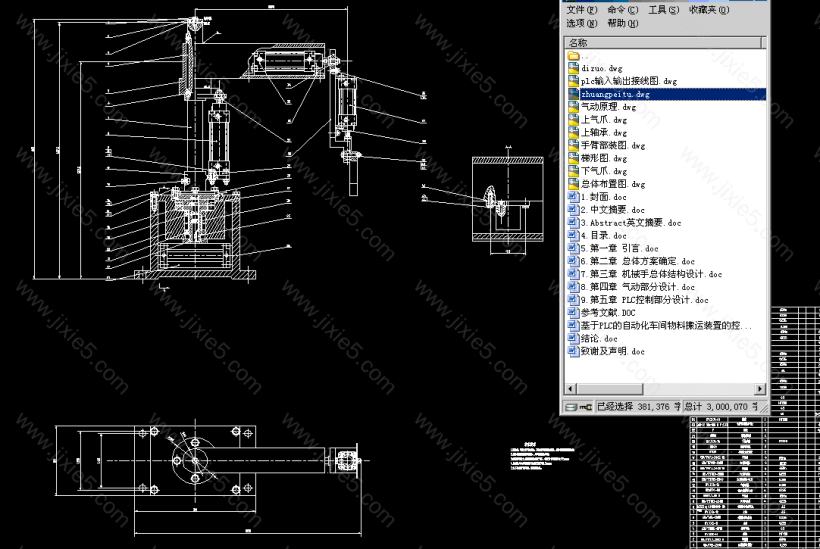
技术要求
1.装配前,轴承用汽油清洗,其他零件用煤油清洗,箱体内壁涂耐油油漆;
2.箱体铸成后应清理铸件,并进行时效处理;
3.箱座和轴承上座和箱后边缘应平齐,相互错位每边不大于2mm;
4.轴承孔中心线与剖分面的位置度为0.5mm;
5.加工后应清除污垢,内表面涂漆。
目录
摘要I
ABSTRACT(英文摘要) Ⅱ
目录IV
第一章引言1
1.1课题的背景和意义1
1.2课题国内外发展现状2
第二章总体方案确定4
2.1总体方案论证4
2.1.1机械手手臂结构方案设计4
2.1.2机械手驱动方案设计4
2.1.3机械手控制方案设计5
2.1.4机械手主要参数5
2.1.5机械手的技术参数列表6
第三章机械手总体结构设计7
3.1动作工况与分析7
3.2机械手各部分结构设计8
3.2.1机械手底座的设计8
3.2.2立柱结构的设计8
3.2.3轴承的选择9
3.2.4上轴承座的选择10
3.2.5下轴承座的选择11
3.2.6大臂的结构设计12
3.2.7小臂的结构设计12
3.2.8气爪的结构设计12
3.2.9手部夹紧气缸设计计算14
3.2.10升降气缸设计计算18
3.2.11伸缩气缸设计计算22
3.2.12回转气缸设计计算25
第四章气动部分设计28
第五章PLC控制部分设计30
5.1电磁铁动作顺序30
5.2 I/O分配30
5.3 PLC控制梯形图31
5.4 PLC控制程序指令32
结论37
参考文献38
致谢及声明39
第二章总体方案确定
2.1总体方案论证
机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
对气动机械手的基本要求是能快速、准确地拾一放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。设计气动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓娶搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制.本次设计的机械手是通用气动机械手,是一种适合于小批生产的、可以变动作程序的自动搬运或操作设备生产场合。
2.1.1机械手手臂结构方案设计
按照抓取工件的要求,本机械手的手臂有四个自由度,即手臂的夹紧、左右回转、左右伸缩和升降运动。手臂的回转和升降运动是通过立柱来实现的,立柱的横向移动即为手臂的手臂的左右伸缩,手臂的各种运动由气缸来实现
2.1.2机械手驱动方案设计
气压传动的优点:
1.对于传动形式而言,气缸作为线性驱动器可在空间的任意位置组建它所需的运动轨迹,安装维护简单;
2.工作介质是取之不劲用之不竭的空气,空气本身不花钱。排气处理简单,不污染环境,成本低。压力等级低,使用安全;
3.气缸动作速度一般为50~500mm/s,比液压和电气方式的动作速度快,其间,通过单向节流阀,可使气缸速度无级调节;
4.可靠性高,使用寿命长。电器元件的有效动作数约为数百万次,而进口的一般电磁阀的寿命大于3000万次,小型阀超过一亿次;
5.利用空气的可压缩性,可储存能量,实现集中供气;
6.全气动控制具有防火、防爆、耐潮的能力。与液压方式相比,气动方式可在高温场合使用;
7.由于空气损失小,压缩空气可集中供应,远距离输送。
根据以上优点可知道气压传动系统的动作迅速,反应灵敏,阻力损失和泄漏较小,成本低廉因此本机械手采用气压传动方式。
2.1.3机械手控制方案设计
综合分析机械手的动作要求,PLC在机械手中需要完成的控制功能较多,控制精度较高,运算速度较快且具有数据处理能力,并考虑整个系统的经济和技术指标,由于PLC的输出电流较小,需要用功率模块来控制比例液压阀,选用西门子公司的S7-200系CPU226型PLC,其I/O功能和指令系统都能满足对该机械手的控制要求。控制按钮、各处的行程开关及压力继电器等开关量信号直接与PLC的输入端子相连,PLC的开关量输出端子直接与各个电磁阀相连,用PLC上所带的24V电源或外接24V电源驱动,采用编程软件(STEP 7-Micro/WIN V4.4版)进行编程和运行监控。
2.1.4机械手主要参数
a.主参数
机械手的最大抓重是其规格的主参数,本设计机械手最大抓重以1kg为数最多。故该机械手主参数定为1kg。
b.基本参数
运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。而影响机械手动作快慢的主要因素是手臂回转的速度。
该机械手最大升降速度设计为100mm/s,最大回转速度设计为450°/s。平均升降速度为80m/s,平均回转速度为90°/s。
2.1.5机械手的技术参数列表
A.设计技术参数:
a)抓重
1公斤(夹持式手部)
b)自由度数
4个自由度
c)最大工作半径
279mm
d)手臂最大中心高
684.5mm
B.手臂运动参数
夹紧行程50mm
夹紧速度50mn/s
升降行程100mm
升降速度100mm/s
回转范围0°~180°
回转速度90°/s
C.手指夹持范围
塑料:Φ40mm
D.定位方式
行程开关
E.定位精度
士0.5mm
F.缓冲方式
液压缓冲器
G.驱动方式
气压传动
H.控制方式
点位程序控制(采用PLC)
3.2.3轴承的选择
轴承是用以支承轴和轴上回转或摆动零件的部件,在各种机械中应用广泛。根据轴承工作时的摩擦性质,可分为滚动轴承和滑动轴承两大类。滚动轴承依靠主要元件间的滚动接触来承受载荷,它与滑动轴承相比,具有摩擦阻力孝效率高、启动容易、润滑简便等优点。同时,滚动轴承绝大部分已经标准化,并由专业厂家生产,选用和更换很方便。其缺点就是抗击能力差,工作时有噪声,以及工作寿命不及液体摩擦的滑动轴承。
滚动轴承的类型很多,按照滚动体的形状,滚动轴承可分为球轴承和滚子轴承两大类。球轴承的滚动体与内、外圈是点接触,运转时摩擦耗损小,但承载能力和抗击能力差;滚子轴承为线接触,承载能力和抗冲击能力较球轴承大,但运转是耗损大。按照滚动轴承能否自动调心,可分为调心轴承和非调心轴承。按照滚动体列数多少,可分为单列轴承、双列轴承和多列轴承。按照轴承能承受的主要载荷方向和公称接触角的不同,可分为向心轴承和推力轴承两大类。
a.向心轴承
向心轴承主要承受径向载荷,0° 45°,又可分为:①径向接触轴承, = 0°,只能承受径向载荷;②角接触向心轴承,0°< 45°,不仅能承受径向载荷,而且随着角的增大,其承受轴向载荷的能力随之增大。
b.推力轴承
推力轴承主要承受轴向载荷,45° 90°,又可分为:①轴向接触轴承, = 90°,只能承受轴向载荷;②角接触推力轴承,450°< <90°,它主要承受轴向载荷,同时也能承受较小的径向载荷。随着角的增大,其承受径向载荷的能力将减校
轴承所受载荷的大孝方向和性质,是选择滚动轴承的主要依据。本设计中轴承既承受径向力及转矩,又承受轴向力,因此选用推力球轴承和深沟球轴承,推力轴承主要受轴向力,球轴承主要受径向力,又根据外廓尺寸的条件和轴的内径选用6006深沟球轴承和51213推力球轴承。