

文件列表
目录
第1章概述............................................................1
1.1执行系统.......................................................1
1.2驱动系统.......................................................1
1.3控制系统.......................................................2
第2章方案设计及主要参数的确定....................................3
2.1方案设计.......................................................3
2.2主要参数的确定.................................................4
第3章抓取机构的设计................................................5
3.1抓取机构结构形式的确定.........................................5
3.2夹紧力(握力)的确定............................................5
3.3夹紧缸驱动力的计算.............................................7
3.4夹钳式抓取机构的定位误差分析...................................8
3.5夹紧液压缸主要尺寸的确定......................................10
3.5.1液压缸内径D的计算......................................10
3.5.2活塞杆直径d的计算......................................11
3.5.3液压缸壁厚δ的计算......................................12
3.5.4液压缸外径D0及长度l的计算..............................12
3.5.5液压缸行程S的确定......................................12
第4章送放机构的设计...............................................13
4.1概述............................................................13
4.2液压系统主要参数的确定..........................................14
4.2.1液压缸工作载荷的确定....................................15
4.2.2液压缸推力的确定........................................15
4.2.3液压缸流量的计算........................................15
4.2.4液压缸基本尺寸的确定....................................15
4.3机械手的腕部设计................................................16
4.3.1腕部结构形式的确定......................................16
4.3.2腕部回转缸驱动力矩的计算................................17
4.3.3腕部回转液压缸尺寸的确定................................21
4.3.4腕部摆动缸驱动力矩的计算................................22
4.3.5腕部摆动液压缸尺寸的确定................................24
4.4机械手的手臂和机身的设计........................................25
4.4.1手臂和机身结构形式的确定................................25
4.4.2手臂驱动力的计算........................................27
4.5液压系统元件的选择..............................................31
4.6液压系统回路的分析..............................................31
4.6.1调压回路................................................31
4.6.2缓冲回路................................................32
4.6.3调速回路................................................32
4.6.4换向回路................................................33
4.6.5锁紧回路................................................33
4.6.6保压回路................................................33
第5章控制系统的设计...............................................34
参考文献..............................................................35
致谢..................................................................36
附录1:科技翻译...........................................37
附录2:实习报告...............................................49
第2章方案设计及主要参数的确定
2.1方案设计
根据课题要求,机械手需要具备上料、翻转和转位等多种功能,并按该自动线的统一生产节拍和生产纲领完成以上动作,因此可采用以下多种设计方案。
(1)直角坐标系式,自动线成直线布置,机械手空中行走,顺序完成上料、翻转、转位等功能。这种方案结构简单,自由度少,易于配线,但需要架空行走,油液站不能固定,这使设计复杂程度增加,运动质量增大。
(2)机身采用立柱式,机械手侧面行走,顺序完成上料、翻转、转位等功能,自动线仍呈直线布置。这种方案可以集中设计液压站,易于实现电气、油路定点连接,但占地面积大,手臂悬伸量较大。
(3)机身采用机座式,自动线围绕机座布置,顺序完成上料、翻转、转位等功能。这种案具有电液集中、占地面积孝可从地面抓取工件等优点,但配线要求较高。
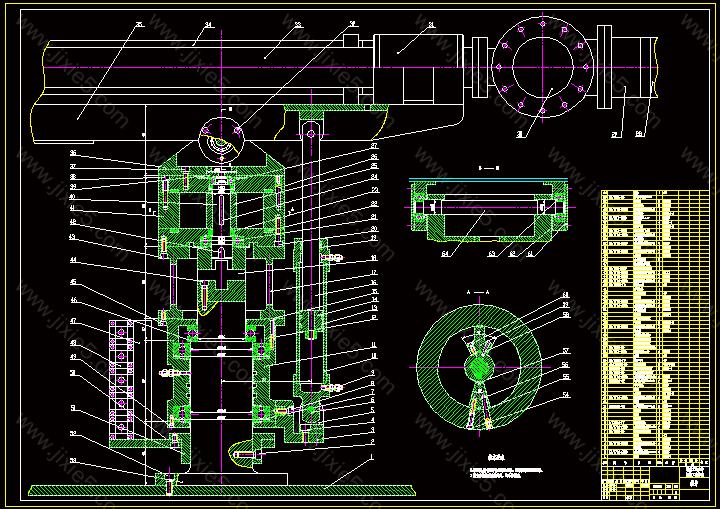
机身

手臂手腕
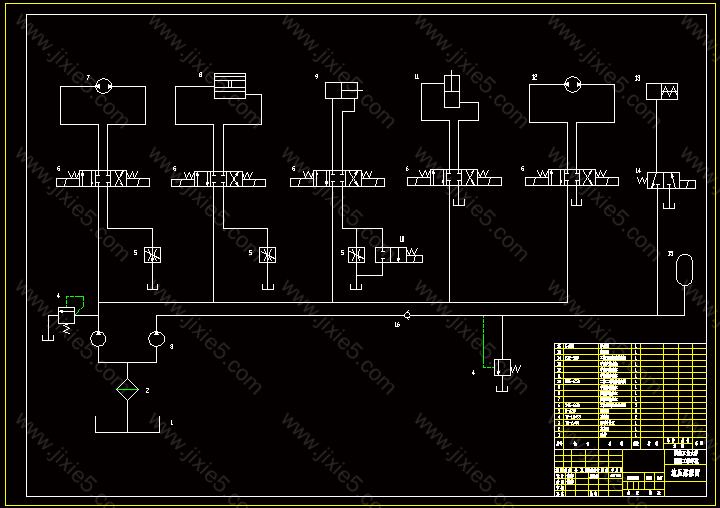
液压原理图














柴油机连杆工艺规程及(铣面、扩孔)夹具设计+2.6万字说明书+工序卡")
加工工艺规程及夹具设计+说明书CAD图纸")


