

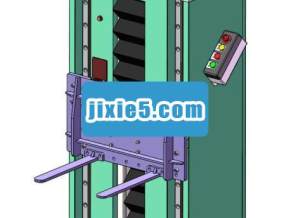
手指装配图
模仿机械手的基本功能和设计思路,根据给定的规定动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成了机械手的设计,并绘制必要的零部件图和装配图,其中包括机器装置的原理方案构思和拟定;原理方案的实现、传动方案的设计;主要结构的设
计简图;设计计算与说明;控制油路系统的设计。
工业机械手设计的主要技术关键问题为:夹持机构的夹紧与翻转;行程机构的转向与伸缩;提升机构的提升;控制油路系统的设计。
七杆二自由度机械手设计内容及基本要求:
设计一个机械手,用于工厂机床边抓取圆棒料和饼类零件,实现从地面到机床卡盘和从机床卡盘到地面的运动。
抓取重量;≤40千克。在总体的设计过程中,该抓取物重量可以减校
机械臂活动范围:活动半径≤2 m夹持物最大直径≤100mm(轴类)、最大直径<300(饼类)
活动高度≤2.0m
动力:尽可能采用机械传动、电磁力或气动。必要时可以采用液压,但不宜使用高压液压设备。
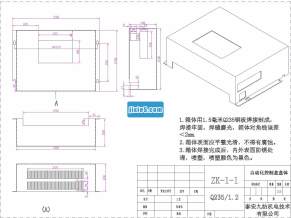
工作量要求:〈1〉平衡臂部件图纸,油缸装配图,活塞零件图,零部件一览表,标准间汇总表。
〈2〉设计说明书
〈3〉英文翻译成汉文(5000字)
第二章机械手基本参数的确定
一个机械手系统所包含的基本参数有抓重(即臂力)、自由度、工作行程(包括转角),行程速度,工作节拍和定位精度等。
2.1抓重
抓重就是指机械手所能搬运物件的重量。考虑到这个机械手的结构强度等因素,且抓重要求是40公斤,所以安全系数K选择在2~3范围内。
2.2转角
结合工厂实地参观的工件摆放和机床设备的摆放位置,做出如下简图:
(虚线所示为手臂抓取工件的位置)
所以我们设计机械手的回转角度为90度。
2.3工作速度
机械手的动作节拍是指机械手完成一个动作循环所需要的时间。它的运动节拍只占到生产节拍的一部分。我们假设机械手夹持的轴形工件是需要在车床上完成车的工序,当工件在机床加工时是不动作的,当这一工序加工结束时机械手才再开始动作,所以这时机械手的动作节拍需要加上工件加工的那段时间。
机械手在上料的过程中,需要完成夹紧工件,手臂上升、手腕回转、手臂伸出、下降、放松工件、手臂缩回、反转、手腕反转等动作。
考虑到以下一些问题,机械手的动作节拍还需要加上以下这些时间:
1.由于继电器、电磁滑阀以及执行机构都有一定的惯性,从动作指令发出到考试动作需要一段时间,因此单个动作时间不宜少于0.2秒(直流电磁阀打开响应时间为0.1~0.5秒,交流电磁阀的打开响应时间为0.01~0.07秒)
2.夹紧或放松动作时间一般定为0.2~0.3秒。
3.手臂伸缩、水平回转和升降运动的时间,是机械手动作节拍的主要部分,应考虑抓重和形成的大孝驱动方式、缓冲方式和定位方式而加以确定。
2.4定位精度
机械手的定位精度是由加工工艺要、机械手本身的结构特点(如制造精度、结构刚性)、抓重、工作行程、工作速度以及驱动、控制方式和缓冲定位方式诸因素所决定。其中加工工艺要求是主要的因素。切削机床上下料机械手的定位精度一般为毫米。

摆动液压

伸缩油缸

手臂

文件列表


















")




