

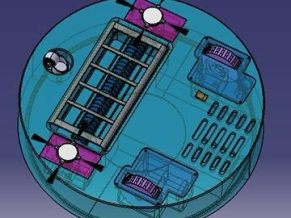
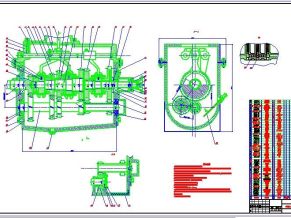
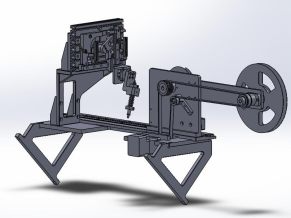
工业机械手装配图1
本文针对圆柱坐标形式工业机械手结构及液压系统进行设计,所设计机械手主要包括手部、腕部、臂部等部分,共4个自由度,可以实现手臂升降、手臂伸缩、手臂回转、手腕回转等动作。首先分析了机械手的研究背景与现状,然后提出总体设计方案,之后对机械手的机械结构进行设计并进行相关力学计算,最后设计计算液压缸,完成液压系统的设计。通过本次设计,对工业机械手的研究和发展具有一定的积极作用。
目录
摘要1
Abstract 2
第一章绪论1
1.1研究背景及意义1
1.2工业机械手研究现状2
1.2.1机械手国外研究现状2
1.2.2机械手国内研究现状3
1.3主要研究内容4
第二章机械手的总体设计5
2.1工业机械手概述5
2.1.1工业机械手的组成5
2.1.2工业机械手的分类6
2.2工业机械手技术参数7
2.3工业机械手设计方案分析7
第三章机械手执行机构设计10
3.1手部结构10
3.1.1手部结构组成特点10
3.1.2手部设计要求10
3.1.3夹紧力的计算11
3.1.4夹紧缸驱动力计算12
3.1.5两支点回转型手指的夹持误差分析12
3.2腕部结构14
3.2.1腕部设计要求14
3.2.2腕部回转力矩的计算16
3.3臂部结构18
3.3.1臂部设计要求18
3.3.2手臂伸缩机构19
3.3.3手臂伸缩液压缸驱动力的计算20
3.3.4手臂升降机构23
3.3.5手臂升降液压缸驱动力的计算24
3.3.2手臂回转机构25
3.3.6手臂回转驱动力矩的计算26
第四章机械手液压系统的设计28
4.1液压系统的组成28
4.1程序控制机械手的液压系统28
4.2液压系统传动方案的确定29
4.2.1各液压缸的换压回路29
4.2.2调速方案29
4.3液压缸的设计计算31
4.3.1夹紧液压缸的设计计算31
4.3.2手腕回转缸的设计计算32
4.3.3手臂伸缩液压缸的设计计算33
4.3.4手臂回转液压缸的设计计算36
结论37
致谢38
参考文献39

目录

字数统计

无标题

工业机械手装配图2

回转缸体

手部机构

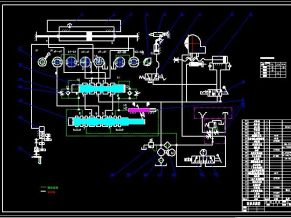
液压系统图

齿轮轴










")
")





")
")
