

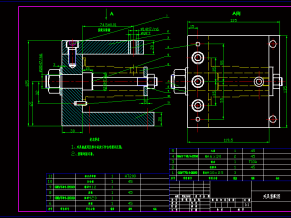
зАХфЭМA3
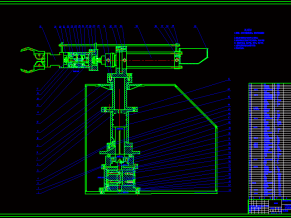
(КЌCADЭМ)ЛњаЕЪжPLCПижЦЛњаЕЪжЩшМЦЛњаЕБЯгХауЩшМЦШЋЬзЦыШЋ
ЛњаЕЪжЪЧФмЙЛФЃЗТШЫЪжЖЏзїЃЌВЂАДЩшЖЈГЬађЁЂЙьМЃКЭвЊЧѓДњЬцШЫЪжзЅЃЈЮќЃЉШЂАсдЫЙЄМўЛђЙЄОпЛђНјааВйзїЕФздЖЏЛЏзАжУЃЌЫќФмВПЗжЕФДњЬцШЫЕФЪжЙЄРЭЖЏЁЃНЯИпМЖаЭЪНЕФЛњаЕЪжЃЌЛЙФмФЃФтШЫЕФЪжБлЖЏзїЃЌЭъГЩНЯИДдгЕФзївЕЁЃдкЛњаЕжЦдьвЕжаЃЌЛњаЕЪжвбБЛЙуЗКгІгУЃЌДгЖјДѓДѓЕиИФЩЦСЫЙЄШЫЕФРЭЖЏЬѕМўЃЌЯджјЕФЬсИпРЭЖЏЩњВњТЪЃЌМгПьЪЕЯжЙЄвЕЩњВњЛњаЕЛЏКЭздЖЏЛЏЕФВНЗЅЁЃдкЮвЙњЃЌЙЄвЕЛњаЕЪжНќФъРДгаНЯПьЕФЗЂеЙЃЌЭЖШыСЫДѓСПЕФШЫСІЮяСІМгвдбаОПКЭгІгУЃЌВЂЧвКмКУЕФаЇЙћЁЃБОПЮЬтжївЊбаОПЕФЮЪЬтЪЧЁАНќОрРыздЖЏвЦЖЏЪНЛњаЕЪжБлЩшМЦЦјбЙЧ§ЖЏЪНЁБЁЃЩшМЦАќРЈСНДѓЗНУцЃЌЦфжажЎвЛЪЧздЖЏаазпВПЗжЃЌСэвЛВПЗжЮЊЪжБлЕФдЫзЊЁЃВЩгУЭЌвЛЧ§ЖЏФмдДЦјБУЁЃаазпВПЗжПЩвдВЩгУЦјбЙТэДяДјЖЏСНТжзЊЖЏЁЃЦјбЙБУЙЬЖЈдкФГДІЃЌгУвЛИљШэЙмНЋБУгыТэДяЯрСЌЃЌТэДяАВзАдкаазпзАжУжаЁЃдЫЖЏЪжБлЕФжБЯпдЫЖЏгУЦјИзРДЪЕЯжЃЌа§зЊдЫЖЏгУЦјбЙТэДяРДЪЕЯжЁЃаазпЕФЪБКђЪжБлВЛЖЏЃЌЪжБлдЫЖЏЕФЪБКђЃЌаазпВПЗжЭЃжЙдЫЖЏЁЃ
ФПТМ
1в§бдЃЈЛђаїТлЃЉЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 1
1.1ЛњаЕЪжМАЦфзщГЩЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 1
1.2ЛњаЕЪжЕФЗжРрЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 2
1.3гІгУЛњаЕЪжЕФвтвхЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 3
1.4ЛњаЕЪжЕФЗЂеЙИХПіЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 3
2ЛњаЕЪжЕФЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 5
2.1ЛњаЕЪжЩшМЦЕФзмЬхЗНАИЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ5
2.2ЛњЦїШЫЕФЙцИёВЮЪ§ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ6
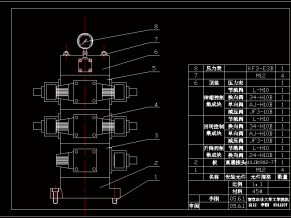
2.3ЦјЖЏВПМўЩшМЦЕФМђвЊЗжЮіЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 7
3ЛњаЕЪжЕФМЦЫуЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 17
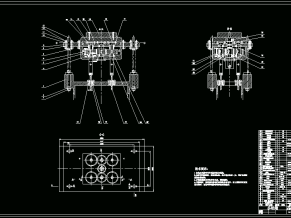
3.1ЩшМЦЪжБлНсЙЙгІзЂвтЕФЮЪЬтЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ17
3.2аЁГЕЕФЩшМЦМАМЦЫуЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 23
4ЛњаЕЪжБлЕФЙЄзїдРэЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 21
4.1ЦјЖЏдРэЭМЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 25
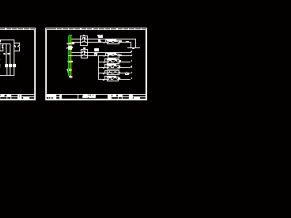
4.2ЕчДХЬњЖЏзїГЬађБэЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 27
4.3ЛњаЕЪжЕФЛКГхКЭЖЈЮЛЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 28
НсТлЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 29
жТаЛЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ30
ВЮПМЮФЯзЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ31
ИНТМAзАХфЭМЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 28
ИНТМBСуМўЭМЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 28

ИДМў

СуМўЭМA3
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ












")
")
")
")
")
")
")
ЁАжсГаЭЈИЧЁБСуМўЕФЛњаЕМгЙЄЙЄвеЙцГЬМАЙЄвезАБИ(КЌCADЭМжН)")
ЫЋЮќРыаФгЭБУЕФНсЙЙМАЦфЛњаЕУмЗтЩшМЦ(КЌcadЭМжН)")
ЦНУцЖўДЮАќТчЛЗУцЮЯИЫДЋЖЏЪ§ПизЊЬЈЕФЩшМЦЛњаЕВПЗж(КЌcadЭМжН)")