

球坐标工业机械手设计(含CAD图纸和WORD说明书)
摘要
工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,作为多学科融合的边沿学科,它是当今高技术发展最快的领域之一,并已成为现代机械制造生产系统中的一个重要组成部分。所谓工业机械手就是一种能按给定的程序或要求自动完成物件(如材料、工件、零件或工具等)传送或操作作业的机械装置,它能部分地代替人的手工劳动。较高级型式的机械手,还能模拟人的手臂动作,完成较复杂的作业。
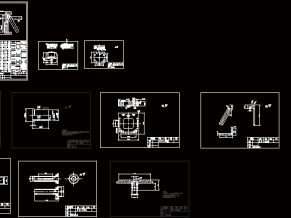
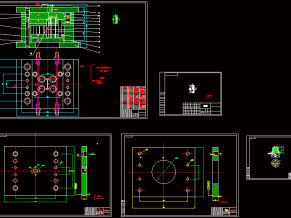
本次设计所确定的机械手的整体结构为球坐标式机械手,手臂动作为摆动或者转动,手爪的动作为伸缩和松夹。由于此机械手的动作要求放置不同的工件,所以实现上下料过程也要求手腕能旋转动作。
本文的机械手用于棒料,直径φ40~φ60,长度450~1200mm,介绍它的组成和分类、自由度和座标型式、液压技术的特点、PLC控制的特点及国内外的发展状况,对机械手进行总体方案设计,确定机械手的座标型式和自由度,确定机械手的技术参数,设计机械手的手臂结构,设计出机械手的液压系统,绘制机械手液压系统工作原理图。利用可编程序控制器对机械手进行控制,选取合适的PLC型号,根据机械手的工作流程制定可编程序控制器的控制方案,画出机械手的工作时的顺序功能图和梯形图,并编制可编程序控制器的控制程序。
目录
摘要II
Abstract III
目录IV
1绪论1
1.1选题背景1
1.2机械手发展现状和趋势2
1.3机械手的系统工作原理及组成2
1.3球坐标工业机械手的组成2
2球坐标工业机械手设计要求与方案3
2.1球坐标工业机械手技术参数3
2.2总体方案分析3
2.3动作原理4
2.4工业机械手的传动方案设计4
2.5球坐标工业机械手驱动方式的选择5
3球坐标工业机械手各主要组成部分设计7
3.1手部结构7
3.1.1手部结构种类7
3.1.2夹持器设计计算8
3.1.3手部校核9
3.2升降方向设计计算9
3.2.1初步确系统压力10
3.2.2升降油缸计算10
3.3油缸主要部位的计算校核14
3.3.1缸筒壁厚的计算14
3.3.2活塞杆强度和液压缸稳定性计算15
3.3.3缸筒壁厚的验算17
3.3.4缸筒的加工要求18
3.3.5法兰设计19
3.3.6 (缸筒端部)法兰连接螺栓的强度计算19
3.4活塞的设计21
3.5导向套的设计与计算22
3.6端盖和缸底的设计与计算24
3.7缸体长度的确定25
3.8缓冲装置的设计25
3.9排气装置26
3.10密封件的选用28
3.11防尘圈29
3.12液压缸的安装连接结构30
3.13水平方向设计计算33
3.13.1水平方向计算33
3.13.2油缸的选型33
3.14底座回转机构设计计算33
3.14.1回转部位负载计算校核34
3.14.2油马达的选型35
3.15机身结构的设计校核37
3.15.1油马达的选择37
3.15.2螺柱的设计与校核37
3.15.3机座的机械结构38
3.6绘制液压系统图39
3.6.1计算和选择液压元件40
3.6.2液压系统性能的验算41
4机械手控制系统设计42
4.1机械手的工艺过程42
4.2 PLC控制系统43
4.3 PLC控制系统程序设计44
总结与展望47
参考文献48
致谢49
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!












")
")
")
")
")
")
")
工艺铣床主轴机械加工工艺规程与钻床夹具设计")
车床拨叉零件的机械加工工艺规程及夹具设计")
左摆动杠杆零件的机械加工工艺规程及工艺装备设计【钻15孔】(含全套CAD图纸)")