

3-RPS并联机构的平衡机
3自由度并联机构的平行机设计(含cad图纸和word说明书)
摘要
文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
目录
第1章前言1
1.1课题研究背景意义1
1.2国内外研究现状2
第2章三自由度并联的结构及工作原理5
2.1并联运动机构概述5
2.2三自由度并联的结构及机械运动原理5
2.3控制系统结构及工作原理6
2.4并联机构工作空间的分析7
第3章并联机构主要部件的设计9
3.1电动机选型9
3.1.1电机的分类9
3.1.2电机的选择9
3.2电动推杆选择10
3.3机构力的计算13
第4章并联机构机并联机构空间分析19
4.1并联机构并联机构机的运动学约束19
4.1.1连杆杆长约束19
4.1.2运动副转角约束19
4.1.3连杆杆间干涉20
4.2确定并联机构空间的基本方法20
第5章三自由度并联机构三维建模21
5.1设计结果21
5.1并联机构solidworks三维建模21
第6章Adαms建模过程22
6.1 Adams软件介绍22
6.1.1 Adams软件简介22
6.1.2 ADAMS软件基本模块24
6.2 Adams建模过程27
6.2.1启动ADAMS 28
6.2.2设置工作环境28
6.2.3创建旋转副、移动副、移动驱动、固定约束29
6.3仿真结果32
结论34
参考文献35
致谢36

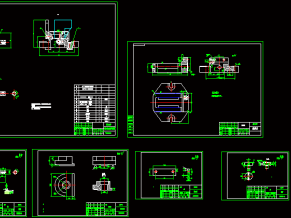
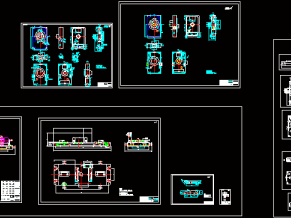
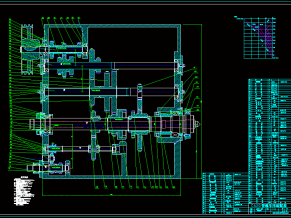
3自由度并联机构 A0

耳轴

螺栓

套 筒

万向节

支路部件图

轴承









")
运输车液压举重机构的实体设计与分析设计+proe三维模型")

基于ADAMS五点斜排机构的分析与设计")
缸体夹紧定位机构设计")
SC750三轴伺服驱动机器人机构设计")
3个自由度搬运机械手的设计")

台式车床车头箱孔系加工分配箱机构设计")
机器人送料(四自由度)")