

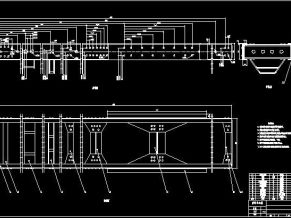
A0-机器人装配图
四自由度物料搬运工业机器人设计
摘要
随着我国工业的不断发展,机器人在工业领域运用的越来越多,但现在国内大多采用串联式的工业机器人,而用于工业领域的并联机器人比较少。并联工业机器人相比于串联工业机器人有很多优点,例如并联工业机器人可以避免串联工业机器人的累积误差,精度相比于串联工业机器人较高,而且结构紧凑,所需的工作空间较校本课题研究了一种四自由度的并联物料搬运工业机器人,通过对其结构的改进和运动学分析,可以进一步提高工作精度。首先,通过三维软件设计出机器人的三维图,然后通过对容易破坏的部件进行有限元分析,最后对机器人进行了动力学分析和仿真,求解出了机器人在负载时的受力情况,并参考有限元分析软件的分析结果对机器人结构进一步优化。结果表明,通过优化搬运工业机器人的结构,所设计的四自由度物料搬运工业机器人可以进一步提高工作精度,并且提高了主动臂等容易破坏部件的强度。
关键词:并联机器人,四自由度,动力学,有限元
目录
第一章绪论1
1.1工业机器人1
1.2串联型工业机器人1
1.3并联型工业机器人2
1.4并联工业机器人在我国的现状及研究方法3
第二章并联机器人的结构设计5
2.1总体结构设计5
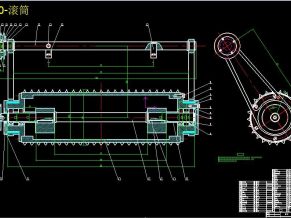
2.2减速部分结构设计6
2.3动平台旋转部分结构设计7
第三章机械部分主要参数设计8
3.1机器人各部分的相互关系8
3.2机器人的技术参数9
3.3传动方案的选择9
3.4电机的选择10
3.5齿轮的设计选择11
3.6有限元分析12
3.7主动臂有限元分析结论16
第四章机器人的动力学分析16
4.1拉格朗日方程法简介16
4.2系统能量求解19
4.3系统动能求解19
4.4机器人的轨迹规划20
4.4.1直线插补算法21
4.4.2圆弧插补算法21
4.5主动臂和从动臂模型动力学分析21
第五章结论24
参考文献26
谢辞27

A3-齿轮箱齿轮

A3-机器人主动臂

A3-主连接杆

并联机器人三维图

目录二

目录一

资料总预览

字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!















")
")

