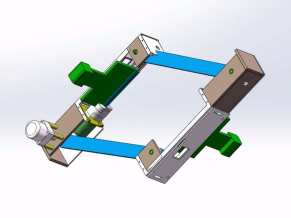
��ά��ͼ
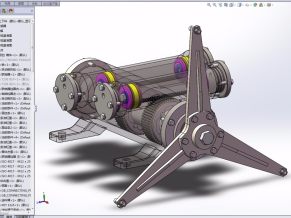
�ڹ�ҵ�ϣ������е�����Ź㷺��Ӧ�ã��繤ҵ�Զ����������ƣ������ϵͳ����е�ֵȡ�����е������Խ��µĵ����豸��������ʼ�ı��ִ�����ҵ��ò�����ĶԻ�е�ֽ��������巽����ƣ�ȷ���˻�е�ֵ�������ʽ�����ɶȣ�ȷ���˻�е�ֵļ���������ͬʱ���ֱ�����˻�е�ֵļг�ʽ�ֲ��ṹ�Լ�����ʽ�ֲ��ṹ;����˻�е�ֵ�����ṹ�������������ת��ʱ������������غͻ�ת������������;����˻�е�ֵ��ֱ۽ṹ��������ֱ�������������Һѹ�������ֱۻ�ת��Һѹ��������
��Ҫ������
��е������Բ��������
��ȡ��������Ϊ30��������
���ɶ�4����X��Y���ƶ���Z����ת��X����ת��
������ת�˶�����ת��180�㣬��������������ִ���
����װ�û�е�ְڱ۵��������г�450mm��Һѹ�������������˼�ֱ�����
����װ�û�е�ְڱ۵��������г�450mm��Һѹ�������������˼�ֱ�����
�����⽫Ҫ��ɵ���Ҫ��������:
(1)��е��Ϊ�����е�֣���������ר�û�е����˵������������������.
(2)ѡȡ��е�ֵ�������ʽ�����ɶ�
(3)��Ƴ���е�ֵĸ�ִ�л���������:�ֲ��������ֱ۵Ȳ�������ơ�Ϊ��ʹͨ���Ը�ǿ���ֲ���Ƴɿɸ����ṹ���ȿ����üг�ʽ��ָ����ȡ���Ϲ������ֿ�����������ѹʽ��������ȡ���Ϲ�����
Ŀ¼
ժҪ������������������������������������������������������������������2
ABSTRACT��������������������������������������������������������������3
��1�����ۡ�����������������������...��������������������������������.4
1.1�����о�Ŀ�ļ����塭����������������������...��������������������.5
1.2�����е����ɼ��ص㡭����������������������...����������������..5
1.3�����е�ֹ�������״������������������������������������������8
1.4���ο����������Ҫ������������������������...����������������10
��2�������е�ַ�����ơ�����������������������...����������������11
2.1�����е����ɼ������ֹ�ϵ������������������������...������������.11
2.2�����е�ַ������������������������������...��������������������12
��3�������е�ֻ�еϵͳ��ơ�����������������������...������������15
3.1�����������Ƽ��㡭������������...������������������������������15
3.2�����˵�ѡ������..������������������������������������������.17
3.3ͬ����������ơ��������������������� ��������������������������22
3.4�������������ѡ������������������...������������������������26
3.5�������ơ�����������������������...����������������������������27
3.6����������ơ�����������������������...������������������������30
��4�������е�ֵ���·��ơ�������������������...������������������35
���ۡ�����������������������...������������������������������������..46
�ο����ס�����������������������...������������������������������������..47��л������������������������...������������������������������������...........48

A0-װ��ͼ

A1-�װ�

A1-��λ���װ�װ֧��

A2-�ֶ�λ���װ�װ��

A2-�ŷ������װ��

A3-˿��

A3-ͬ������

A3-֧��һ

A4-����

A4-�����װ��

A4-��λԲ��
���������������û��ϴ�������Ȩ��ԭ�������У����漰��Ȩ���⣬����������ϵ�����ǽ���ʱ������