

��ά��ͼ
�����ı��ι��������˵�����ص�������SOLIDWORKS������ƹ����У��˽�����ı��ι��������˵Ľṹ��������ά������ʹ��Ҫ�졣
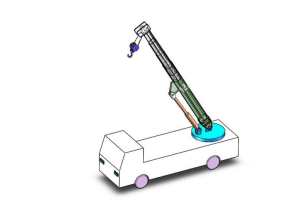
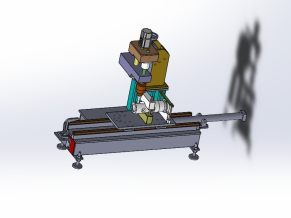
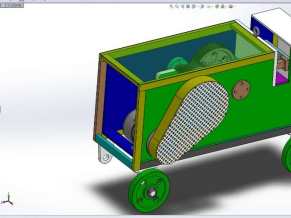
���ĵ����Ŀ������ƴ����ı��ι��������ˡ������������ʵ�ֻ����˶��Ŀ��ƣ������ĸ˻�����Ϊ��ƻ�����ͨ������������������ʵ�ֹ������ܡ�
���о����ݰ�����
��1�����ܷ����뷽����ƣ�
��2���ṹ�������ά���ͣ�
��3���˶����棻
��4������ϵͳ��ơ�
��֪���������ı��ι��������˵�������130KG,��������70G������ȡ������Ϊ200Kg���ƶ��ٶ�Ϊ1~2r/min��
���ݼ�������������Լ��������������������ѡ�õ���ͺ�Ϊ160BL-4030H1-LK-B����������Ϊ0.1KW���ת��Ϊ7.62N.m����ߵ�ת����9N.m�����ת����3000r/min
����Ƶ�Ŀ�������һ�ִ����ı��ι����������û����ߴ�Ϊ���ͣ������������ʵ�ֻ����˶��Ŀ��ơ������ĸ˻�����Ϊ��ƻ�����ͨ������������������ʵ�ֹ������ܡ�
�ؼ��ʣ������ı��ι��������ˣ��ṹ���ĸ˻���������ҡ��
Ŀ¼
ժҪ...........................................................i
ABSTRACT ...................................................ii
Ŀ¼...........................................................iii
1����...........................................................1
1.1�����������о���Ŀ���Լ�����...........................1
1.2�����ı��ι��������˵ķ�չ��״...........................2
1.3�������������...........................................5
1.4�û����˵�Solidworks���...................................7
1.4.1��ͼ����...........................................9
1.4.2���������ο�������Ĵ���...........................10
1.4.3���졢��ת��ɨ��ͷ���������...................11
1.4.4����ͼ�����...................................12
1.4.5װ�����...........................................12
2�����ı��ι������������巽��ṹ�����...................12
2.1�����ı��ι��������˵����巽��ͼ...................12
2.2�����ı��ι��������˵Ĺ���ԭ��...........................12
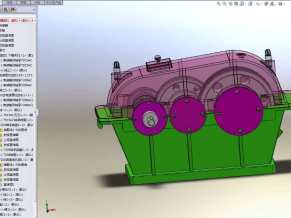
3��е��������Ƽ���...........................................16
3.1�ŷ������ѡ�ͼ���...................................16
3.2���������Ƽ���...................................17
3.3��е���Ƽ���...........................................17
4��Ҫ�㲿����ǿ��У��...................................18
4.1������ǿ�ȵ�У��...................................19
4.2���ǿ�ȵ�У�˼���...................................19
����...........................................................19
��л...................................................20
�����...................................................21
��¼һ...........................................................32
��¼��...........................................................40

A0-װ��ͼ

A1-����1

A1-����2

A4-��װ����

A4-�ڱ�

A4-������1

A4-����

A4-����

A4-�����
���������������û��ϴ�������Ȩ��ԭ�������У����漰��Ȩ���⣬����������ϵ�����ǽ���ʱ������











")
")






