

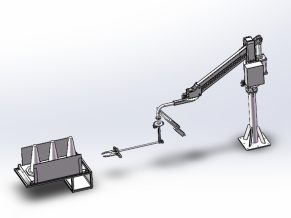
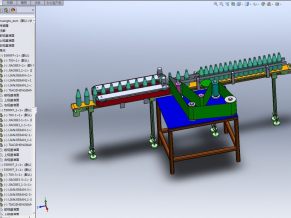
三维截图
整个装置我们假设承受总重量为100Kg(由于考虑到人的重量),整个腿部机构升降速度大致为1~2r/min。
根据本次设计由于为了监护床的方便使用,不需要考虑外接电源,所以要需要蓄电池带动电机,这里我们选择直流无刷电机,直流无刷电机的型号是92BL-A类型的。
根据计算和特性曲线以及电机基本参数表,我们选用直流无刷电机型号为
92BL-4030H1-LK-B,
电机额定功率为0.4KW,
额定转矩为1.3N.m,
最大转矩为2.6N.m,
额定转速为3000r/min。
摘要
本文介绍新型一种多功能监护床的抬腿机构,技术结构上在于使用了曲柄滑块机构。由电机带动曲柄转动,这样滑块便可以上下反复运动。
此种多功能监护床的抬腿机构,其特征在于:装有导轨和滑块,导轨上装一可在导轨上滑动的移动腿部,这样整体支腿可以随着导轨上下反复运动,实现运动平稳可靠,满足需求。
关键词:监护床;导轨滑块;曲柄滑块机构。
目录
摘要...........................................................1
Abstract ...................................................1
第一章绪论...................................................3
1.1概述...........................................................3
1.2监护床发展现状及趋势...........................................5
1.3监护床抬腿机构的方桉分析...................................8
第二章机械结构的设计..........................................12
2.1减速比分配及电机和减速器的选型..........................12
2.2同步带传动设计..........................................13
2.3传动轴设计..................................................14
第三章直线导轨滑块的设计..................................16
3.1导轨的设计和作用要求..........................................16
3.2导轨结构设计..................................................22
第四章结构设计的三维建模.........................................23
4.1零部件的建模...................................................23
4.2装配体的建模...................................................24
结论..........................................................25
致谢..........................................................26
参考文献: ..................................................27

A0-装配图

A3-大同步带轮

A3-转动连杆

A3-转盘

A3-转轴

A4-小同步带轮











")
")
")
")
")


")

