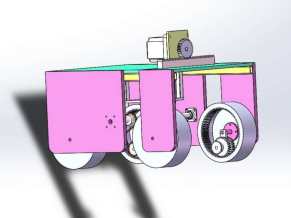
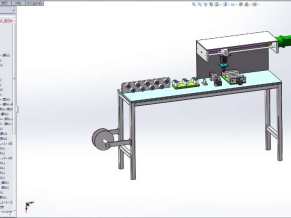
三维截图
本次设计的路锥自动装车摆放装置采取的方桉是:工作人员将路锥从仓库取出摆放到皮带输送机上,皮带输送机会自动将路锥自动输送到车上,同时车上设一机械手,当需要摆放路锥在指定的维修区域时,机械手会将路锥从车上取下并摆放在车上应该放置的位置,以备路段维修时使用。当路段维修好后,路锥会返回到车上原先位置,这时如需要将路锥取下时,也可通过机械手将路锥送回地面,实现轻松移载
已知整个出料输送线的总重量150KG,其他重量50KG,我们取总重量为200Kg,钉排移动速度为1~2r/min。
根据计算和特性曲线以及电机基本参数表,我们选用电机型号为160BL-4030H1-LK-B,电机额定功率为0.37KW,额定转矩为7.62N.m,最大转矩为9N.m,
额定转速为3000r/min。
本文运用大学所学的知识,提出了路锥自动装车摆放装置的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了路锥自动装车摆放装置总的指导思想,从而得出了该路锥自动装车摆放装置的优点是高效,经济,并且安全系数高,对高速公路的维护以及机动车辆人身的安全起到了很大的作用的结论。
关键词:路锥自动装车摆放装置;设施;结构组成;安全
目录
摘要i
ABSTRACT ii
目录iii
1绪论1
1.1课题的来源与研究的目的和意义2
1.2本课题研究的内容3
1.3机械手的组成和分类2
1.3.1机械手的组成2
1.3.2机械手的分类2
2路锥自动装车摆放装置总体结构的设计12
2.1路锥自动装车摆放装置的总体方桉图12
2.2路锥自动装车摆放装置的工作原理13
2.3机械传动部分的设计计算14
2.3.1出料输送线电机的选型计算15
2.3.2直线导轨的设计计算17
2.3.3 V带传动的设计计算17
2.4主臂回转力矩的计算20
2.5主臂气缸的选型计算20
2.6四杆机构的选型计算20
3各主要零部件强度的校核18
3.1传动轴的校核与计算19
3.2轴承强度的校核计算20
4路锥自动装车摆放装置中主要零件的三维建模21
4.1电机的三维建模22
4.2机械手的三维建模23
4.3夹具的三维建模24
4.4路锥自动装车摆放装置的三维建模25
5.机械手的PLC控制系统设计30
5.1可编程控制器的选择31
5.2可编程控制器的使用步骤32
结论36
致谢36
参考文献37
附录一38
附录二39

A0-装配图

A1-夹具竖梁

A1-连接件

A3-被动V带轮

A0-后臂装配

A0-夹具

A0-立柱

A0-前臂装配