

Ш§ЮЌНиЭМ
вбжЊећИіЛњаЕЪжМаГжЦїЕФзмжиСП50KG,ЦфЫћжиСП150KGЃЌЮвУЧШЁзмжиСПЮЊ200KgЃЌвЦЖЏЫйЖШЮЊ1~2r/minЁЃ
ИљОнвдЩЯЕУГіЪ§ОнЃЌЮвУЧбЁгУЕчЛњаЭКХЮЊ160BL-AЃЌДЫЕчЛњГЇМвЮЊЛњЕчВњЦЗЁЃ
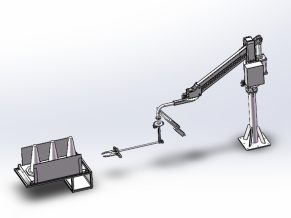
БОДЮЩшМЦЕФЬтФПЪЧЖрЙЄЮЛзЈгУCA18ЛњаЕЪжЕФЩшМЦЃЌБОДЮЩшМЦЕФЖрЙЄЮЛзЈгУCA18ЛњаЕЪжЕФжївЊФкШнЮЊЃК
ЃЈ1ЃЉЖдЖрЙЄЮЛзЈгУЛњаЕЪжЕФЙЄПіНјааЗжЮіЁЃ
ЃЈ2ЃЉЪЕЯжЖрЙЄЮЛзЈгУЛњаЕЪжЭъГЩаЁБлЩЯЯТИЉбіЁЂДѓБле§ЗДЯђЛизЊЁЂаазпзАжУНјЭЫШ§ИіздгЩЖШЃЌвдМАЪжзІЕФПЊЦєКЭБеКЯЕШЖЏзївЊЧѓЁЃ
ЃЈ3ЃЉИјГівКбЙЯЕЭГЕФЕчДХдЊМўЖЏзїбађБэКЭвКбЙЯЕЭГдРэЭМЁЃ
ИљОнМЦЫуКЭЬиадЧњЯпвдМАЕчЛњЛљБОВЮЪ§БэЃЌЮвУЧбЁгУЕчЛњаЭКХЮЊ160BL-4030H1-LK-BЃЌЕчЛњЖюЖЈЙІТЪЮЊ0.2KWЃЌЖюЖЈзЊОиЮЊ7.62N.mЃЌзюДѓзЊОиЮЊ9N.mЃЌЖюЖЈзЊЫйЮЊ3000r/minЁЃ
еЊвЊЃКБОДЮЩшМЦЕФЬтФПЪЧЖрЙЄЮЛзЈгУCA18ЛњаЕЪжЕФЩшМЦЃЌЪзЯШЖдЖрЙЄЮЛзЈгУCA18ЛњаЕЪжЕФЙЄПіНјааЗжЮіЃЌДЫЖрЙЄЮЛзЈгУЛњаЕЪжЭъГЩаЁБлЩЯЯТИЉбіЁЂДѓБле§ЗДЯђЛизЊЁЂаазпзАжУНјЭЫШ§ИіздгЩЖШЃЌвдМАЪжзІЕФПЊЦєКЭБеКЯЕШЖЏзїЃЌШЛКѓИјГіИУЖрЙЄЮЛзЈгУCA18ЛњаЕЪжЕФвКбЙЯЕЭГЕФЕчДХдЊМўЖЏзїбађБэКЭвКбЙЯЕЭГдРэЭМЁЃ
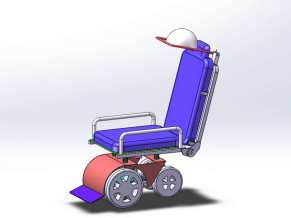
БОаЕЪжгЩДѓБлНсЙЙЃЌаЁБлЁЂа§зЊНсЙЙКЭЧ§ЖЏЛњЙЙзщГЩЁЃИУЩшМЦФмЪЕЯжШ§ИіздгЩЖШЃЌЗжБ№ЮЊЪжзІЕФПЊКЯЃЌа§зЊЃЌаЁБлЕФЩЯЯТАкЖЏвдМАДѓБлЕФа§зЊЕШЕШЙІФмЁЃ
ЙиМќДЪЃКЖрЙЄЮЛзЈгУCA18ЛњаЕЪж,вКбЙЯЕЭГ,здгЩЖШ,ЙІФм
ФПТМ
еЊвЊ......................................................................I
Abstract ..............................................................II
ЕквЛеТаїТл..............................................................1
1.1БОПЮЬтбаОПЕФФкШн......................................................1
1.2ЙњФкЭтЗЂеЙзДПі......................................................2
1.3ЛњаЕЪжЕФзщГЩКЭЗжРр......................................................4
1.4вКбЙДЋЖЏЕФЛљДЁжЊЪЖ......................................................6
ЕкЖўеТЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжЕФЩшМЦЗНшё..............................8
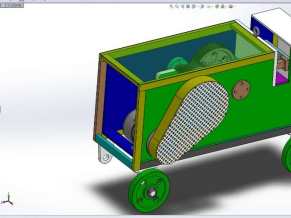
2.1ЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжЕФзмЬхЗНшёЭМ..............................9
2.2ЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжЕФЙЄзїдРэ..............................10
ЕкШ§еТЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжНсЙЙЕФЩшМЦ..............................11
3.1МаГжЪНЪжВПНсЙЙ......................................................12
3.1.1ЪжжИЕФаЮзДКЭЗжРр..............................................13
3.1.2ЩшМЦЪБПМТЧЕФМИИіЮЪЬт..............................................14
3.1.3ЪжВПМаНєвКбЙИзЕФЩшМЦ..............................................14
3.2вКбЙИзЧ§ЖЏСІОиЕФМЦЫу..............................................16
3.3вКбЙИзЧ§ЖЏСІОиЕФМЦЫуаЃКЫ..............................................17
3.4ЕчЛњЕФбЁаЭМЦЫу......................................................18
ЕкЫФеТЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжжаЙиМќСуВПМўЕФЧПЖШМЦЫугыаЃКЫ..............23
4.1ГнТжЕФЧПЖШМЦЫугыаЃКЫ..............................................24
4.2жсЕФЧПЖШМЦЫугыаЃКЫ......................................................25
ЕкЮхеТЖрЙЄЮЛзЈгУCA18ЛњДВЛњаЕЪжвКбЙЯЕЭГЕФЩшМЦ..............................26
5.1вКбЙЯЕЭГдРэЭМЕФШЗЖЈ..............................................27
5.2ЕчДХдЊМўЖЏзїбађБэЕФШЗЖЈ..............................................29
змНс......................................................................30
жТаЛ......................................................................31
ВЮПМЮФЯз..............................................................32

A0-зАХфЭМ

A1-ЪжБл

A2-жсГазљ

A2-зЊЬЈ

A3-ДЋЖЏжс

A3-ЕМЙь

A4-МазІ

A0-Еззљ

A0-СЂжљ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ











")

")
")





