зАХфЭМЃЈе§ЪНЃЉ
ФПТМ
1в§бдЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 1
1.1вЦЖЏЛњЦїШЫЛњаЕБлЕФбаОПвтвхМАФПЕФЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 1
1.2вЦЖЏЛњЦїШЫЕФЗЂеЙЯжзДМАбаОПЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 2
1.3БОПЮЬтЕФРДдДКЭбаОПФкШнЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 5
2вЦЖЏЛњЦїШЫЛњаЕБлЕФзмЬхЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 7
2.1ЛњаЕБлНсЙЙЕФШЗЖЈЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 7
2.2ЛњаЕБлЩшМЦЕФжївЊВЮЪ§ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 7
3вЦЖЏЛњЦїШЫЛњаЕБлЕФЪжВПНсЙЙЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 8
3.1ЪжВПНсЙЙЩшМЦвЊЧѓЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 9
3.2ДЋЖЏЗНЪНЕФбЁдёЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 9
3.3ЪжВПНсЙЙЕФЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 9
3.4ЕчЛњЕФМЦЫугыаЭКХбЁдёЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 12
3.5ВФСЯЕФбЁдёгыЧПЖШаЃКЫЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 14
3.6БОеТаЁНсЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 17
4вЦЖЏЛњЦїШЫЛњаЕБлЕФБлВПНсЙЙЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ18
4.1БлВПНсЙЙЩшМЦвЊЧѓЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 18
4.2БлВПНсЙЙЕФЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 19
4.3БлВПЕчЛњЕФбЁдёЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 26
5вЦЖЏЛњЦїШЫЛњаЕБлЕФМчВПНсЙЙЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 28
5.1МчВПЕФДЋЖЏЗНЪНЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 28
5.2МчВПНсЙЙЕФЩшМЦЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 29
5.3МчВПЕчЛњЕФбЁдёЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 31
5.4МчВПжБСїЕчЛњЕФМЦЫуЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ32
5.5МчВПЫХЗўЕчЛњгыБлВПКЭЪжВПВННјЕчЛњЕФПижЦЁЁЁЁЁЁЁЁЁЁЁЁЁ 33
6вЦЖЏЛњЦїШЫЛњаЕБлЕФНсЙЙЗжЮіЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 30
6.1ЛњаЕБлзмЬхНсЙЙЗжЮіЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ37
6.2ЛњаЕБлЕФМчВПНсЙЙЗжЮіЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 39
6.2БОеТаЁНсЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 39
НсЪјгяЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 42
жТаЛЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 45
ВЮПМЮФЯзЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ 46
вЦЖЏЛњЦїШЫЛњаЕБлЕФбаОПвтвхМАФПЕФ
БОЮФвдЪЕМЪЯюФПаЁаЭЕиУцвЦЖЏЛњЦїШЫЕФЛњаЕБлЮЊбаОПЖдЯѓЁЃЩшМЦвЦЖЏЛњЦїШЫЕФЛњаЕБлЕФНсЙЙЁЃЫљЮНвЦЖЏЛњаЕБлЃЌОЭЪЧНЋЛњаЕБлАВзАдкЪЧвЛИіаЁаЭЖргУЭОвЦЖЏзївЕЛњЦїШЫжЧФмвЦЖЏЦНЬЈЃЌаЁаЭЖргУЭОвЦЖЏзївЕЛњЦїШЫЪЧвЛИіжЧФмвЦЖЏЦНЬЈЃЌЦфЩЯПЩДюдиБЌеЈЮяДІРэЁЂеьВьЁЂЭЈбЖЁЂЬНВтЯЕЭГЛђЦфЫћЬиЪтзївЕЯЕЭГЁЃвЦЖЏЛњаЕБлгУРДЪЕЯжвЛаЉЖЏзїШчзЅШЁЃЌПЩвддкЛњаЕБлЕФФЉЖЫжДааЦїЩЯАВзАвЛЖЈЕФЙЄОпНјаазївЕЃЌЭЈЙ§вЦЖЏЦНЬЈЕФвЦЖЏРДРЉДѓЛњаЕБлЕФЙЄзїПеМфЃЌетжжНсЙЙЪЙвЦЖЏЛњаЕБлгЕгаИќДѓЕФВйзїПеМфКЭИпЖШЕФдЫЖЏШпградЃЌВЂЭЌЪБОпгавЦЖЏКЭВйзїЙІФмЃЌетЪЙЫќгХгкДЋЭГЕФЛњаЕБлЃЌдђОпгаСЫИќЙуРЋЕФгІгУЧАОА[1]ЁЃФПЧАжЧФмвЦЖЏЛњЦїШЫе§ЯђзХФтШЫЛЏЁЂЗТЩњЛЏЁЂаЁаЭЛЏЁЂЖрбљЛЏЗНЯђЗЂеЙЃЌЦфгІгУвВдНРДдНЙуЗКЃЌМИКѕЩјЭИЕНИїИіСьгђ[2]ЁЃ
вЦЖЏЛњЦїШЫММЪѕЕФбаОПЪєгкЖрбЇПЦЯрЛЅНЛВцЃЌЯрЛЅЩјЭИЕФЃЌЖдЫќЕФбаОПОпгаКмДѓЕФРэТлМлжЕКЭЙуРЋЕФгІгУЧАОАЁЃдкЙЄвЕЛњЦїШЫЮЪЪР40ЖрФъКѓЕФНёЬьЃЌЛњЦїШЫМКБЛШЫУЧПДзїЮЊвЛжжЩњВњЙЄОпЃЌЭЌЪБЫцзХПЦбЇММЪѕЕФбИЫйЗЂеЙКЭШЫУЧЩњЛюЫЎЦНЕФЬсИпЃЌЛњЦїШЫЕФЙІФмМКВЛдйЪЧжЛФмДгЪТФГЯюМђЕЅЕФВйзїЃЌЖјЪЧПЩвдГаЕЃЖржжШЮЮё;ЛњЦїШЫЕФЙЄзїЛЗОГвВВЛдйЪЧЙЬЖЈдкЙЄГЇКЭГЕМфЯжГЁЃЌЖјЪЧПЊЪМзпЯђКЃбѓЁЂЬЋПеКЭЛЇЭтЃЌгааЉЩѕжСвбОНјШывНдКЁЂМвЭЅКЭгщРжГЁЫљЁЃОпгажЧФмЬиадЕФзджїЪНвЦЖЏЛњЦїШЫе§дкЯђЗЧжЦдьвЕЗНЯђРЉеЙЃЌетаЉЗЧжЦдьвЕАќРЈКНЬьЁЂКЃбѓЁЂОќЪТЁЂНЈжўЁЂвНСЦЛЄРэЁЂЗўЮёЁЂХЉСжЁЂАьЙЋздЖЏЛЏКЭджКІОШЛЄЕШЃЌШчЗЩааЛњЦїШЫЁЂКЃФбОШдЎЛњЦїШЫЁЂЛЏЗЪКЭХЉвЉХчШіПежаЛњЦїШЫЁЂЛЄРэЛњЦїШЫЕШЁЃНќФъРДЃЌЖдвЦЖЏЛњЦїШЫЕФбаОПЪмЕНжиЪгЃЌЗТееЩњЮяЕФЙІФмЖјЗЂУїЕФИїжжвЦЖЏЛњЦїШЫдНРДдНЖрЃЌаЁЕНгщРжЛњЦїШЫЭцОпЁЂМвгУЗўЮёЛњЦїШЫЃЌДѓЕНЙЄГЬЬНЯеЁЂЗДПжЗРБЌЁЂОќЪТеьВьЛњЦїШЫЕШЁЃЯргІЕиЃЌетаЉСьгђЖдЫљгІгУЕФвЦЖЏЛњЦїШЫЯЕЭГвВЬсГіСЫИќИпЕФвЊЧѓЃЌЬиБ№ЪЧдкЛњЦїШЫЕФдЫЖЏЫйЖШЁЂСщЛюадЁЂзджїадЁЂзївЕФмСІЕШЗНУцЕФвЊЧѓдНРДдНИпЁЃвђДЫЃЌЮоТлЪЧдкжЦдьвЕЛЙЪЧдкЗЧжЦдьвЕЃЌОпгажЧФмЬиадЕФзджїЪНвЦЖЏЛњЦїШЫГЩЮЊСЫЙњФкЭтбаОПЕФШШЕуЁЃ
РњЪЗЩЯвЛЧаИпаТММЪѕЮоВЛЪзЯШгІгУгкОќЪТСьгђЃЌвЦЖЏЛњЦїШЫЛњаЕБлвВВЛР§ЭтЁЃЫцзХЖўЪЎЪРМЭФЉЕФМИГЁОжВПеНељКЭЖўЪЎвЛЪРМЭГѕЦкЯЏОэШЋЧђЕФЗДПжеНељНјГЬЃЌЬижжеНељвдМАГЧЪаеНељШевцГЩЮЊеНељвЛРраЭЕФжїНЧЃЌетвЛзЊБфжБНгЭЦЖЏСЫИїЙњЕиУцвЦЖЏзїеНЦНЬЈМДОќгУЕиУцвЦЖЏЛњЦїШЫЕФЗЂеЙЁЃЯжДњеНељЭЙЯжСЫОжВПЗЖЮЇФкЕФаХЯЂЛЏЃЌЖјеНГЁЛњЦїШЫЦОНшздЩэЕФгХЪЦЬиЕуЃЌвбОдкБОЪРМЭЕФеНељЃЌР§ШчвСРПЫеНељжаГЩЮЊвЋблЕФаТаЧЁЃЯжДњеНГЁгШЦфЪЧГЧЪаФкЗДПжВРеНељжаЕЅБјЕФЩњДцФмСІЪмЕНСЫМЋДѓЕФЬєеНЃЌЮЂаЁаЭЕиУцвЦЖЏЛњЦїШЫгЩгкЬхЛ§аЂвўБЮадКУЁЂПьЫйЗДгІЁЂЛњЖЏадКУЁЂЩњДцФмСІЧПЁЂГЩБОЕЭЕШЬиЕуЃЌВЂЧвПЩвддкдЖГЬвЃПиЩѕжСзджїЧщПіЯТЭъГЩВПЗждБОгЩЪПБјЭъГЩЕФШЮЮёЃЌПЩвдВЛТлАзЬьЛЙЪЧКквЙЖМФмСЫНтжмЮЇЕФТЅЗПРяМАНжЕРЩЯЕФЕаЧщЁЃГ§еьВьЭтЃЌЮЂаЁаЭЛњЦїШЫДюдиЮЂаЁаЭЮфЦїЯЕЭГЛЙПЩЭъГЩжюШчЩЈРзЁЂХХГ§БЌеЈЮяЁЂПижЦЮфЦїЩфЛїЕШИїЯюШЮЮёЃЌЖјЧвВЛЛсгаШЫдБЩЫЭіЃЌМЋДѓМѕЩйСЫЩЫЭіТЪЁЃвђДЫЬиБ№ЪЪгУгкГЧЪаКЭЖёСгЛЗОГЯТЕФОжВПеНељКЭаХЯЂЁЂеНељЃЌОпгажиДѓвтвхКЭОќЪТаЇвцЁЃЖўЪЎвЛЪРМЭЕФеНГЁЃЌеНељЕФГѕЦкМЋПЩФмЪЧвЛГЁЮоШЫЯЕЭГЕФНЯСПЁЃгРВЛЦЃОыЁЂЮоЫљЮЗОхЕФЮЂаЁаЭЮоШЫвЦЖЏЛњЦїШЫЪЧзюРэЯыЕФЪПБјЁЃЫќУЧвбдкеНељжаЯдЪОГіЕФзїеНБОСьЃЌПЩвджЄУїЫќУЧдкЮДРДеНГЁЩЯЕФживЊЕиЮЛЁЃЮЂаЁаЭЮоШЫвЦЖЏЛњЦїШЫЕФЛњаЕБлЬиБ№ЪЪгУгкГЧЪаКЭЖёСгЛЗОГЯТ(ШчКЫЁЂЩњЁЂЛЏеНГЁЕШ)ЕФОжВПеНељКЭаХЯЂеНељЃЌОпгажиДѓеНТдвтвхКЭаЇвцЁЃ

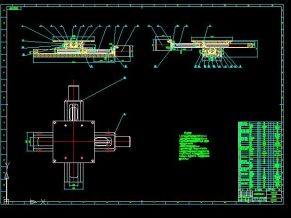
БлВПзЊЙиНк

ДѓБлЙЄзжИж

ДѓБлЙиНк

СуМўЭМКЯМЏ1

ЪжВПГнТжA

ЬзЭВ

ЕїећЕцЦЌ

аЁБлЬх

жсГаЖЫИЧ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ