A0-大臂装配图
摘要3
Abstract 4
1.机器人概述6
1.1焊接机器人国内外应用现状6
1.2焊接机器人的发展趋势5
1.2.1国外焊接机器人的发展趋势6
1.2.2国内焊接机器人的发展趋势6
1.3我要研究什么6
2.机器人系统结构设计6
2.1焊接机器人构成及工作原理6
2.1.1操作机6
2.1.2末端执行器8
2.1.3传感器系统8
2.3 AⅡ-V6L主要参数8
2.4主要功能10
2.5主要结构尺寸12
3.关节设计13
3.1大臂设计13
3.2机座和腰部设计13
3.3谐波减速器14
3.3.1谐波减速器工作原理14
3.3.2谐波减速器的选择15
3.4圆柱齿轮传动17
4.机器人轴承设计21
4.1工业机器人专用轴承结构形式21
4.2工业机器人专用轴承特点22
4.2.1薄壁密封四点接触球轴承特点22
4.2.2薄壁密封交叉滚子轴承特点22
4.3薄壁四点接触琢轴承设计22
4.3.1主参数优化设计22
4.3.2约束条件23
4.3.3关键结构参数设计23
5.总结25
致谢辞27
参考文献28
附: 29

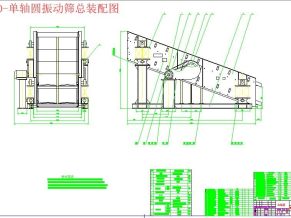
A0-总装图

A0-机座装配图

A1-圆柱大齿轮

A1-圆柱小齿轮

目录

目录二

资料总预览

字数统计