

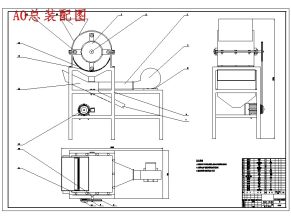
三维装配图
摘要
在我国北方大多数地区,冬天下雪量多,下雪时间比较长,尤其是新疆乌鲁木齐,长时间堆积的积雪的清除也成为城市正常运行的基矗大多数地区开始使用除雪机械来代替原始的人工扫雪。与原始的人工扫雪,除雪剂除雪相比机械式除雪具有更高的效率,更低的耗能,因此得到了广泛的应用和迅速的发展。
但是已有的大型扫雪机械设备不适用于如校园,小区等较窄的道路,并且目前的除雪机械中自主扫雪功能的实现还未成熟,因此设计出可自主实现导航避障功能的自主扫雪机器人也是非常有意义的,此次设计基于国内外已有的扫雪设备和方法研究出了一种适合较窄道路的可实时进行清扫工作的微型全自主扫雪机器人。
本主要是对其机械结构进行设计和创新,对其设计方案和工作原理进行分析,对其重要部分的零件进行计算和校核。最终用UG NX10.0软件建立出扫雪机器人各个部件的三维模型,然后进行装配,行成运动仿真。在此次设计研究中,主要用到了以下几个关键技术:利用UG NX10.0软件建立了扫雪机零件的三维实体模型,进行装配后实现运动仿真,导出二维装配图。利用Auto CAD 2007软件对导出的二维装配图进行修改达到国家标准图纸要求。
关键词扫雪机;UG NX10.0;三维设计;设计计算
Abstract
Due to thexinjiang region special climate,winter time is longer, the more snow, so looking for a kind of high efficiency, structure is simple, low costway of snow become the top priority.With the current artificial snow, snow removal agent snow removal than mechanical snow removal has higher efficiency, lower energy consumption, therefore has beenwidely used and rapidly developing.
But the existing large snow machinery equipment does not apply to such as campus, community and so on a narrow path, and the realization of the function of autonomic snow in the snow removal machine is notyet mature, so design can be independent autonomous navigation and obstacle avoidance and functions to sweep robot is alsovery meaningful,
This design is based on the domestic and foreign existing snow device and method developed a suitable for narrow roads may real-time full autonomy to sweep microrobots for cleaningwork.This paper is mainly to its mechanical structure design and innovation, the design scheme andworking principlewere analyzed, and the important part to calculate and check the parts.Use UG NX10.0 software to create 3d modeling of all parts of the robot, create the physical model, and carry out motion simulation.In this project study, mainly adopts the following key technologies: using UG NX10.0 software 3 d entity modeling technology and assembly technology, created the snowplow components of the three-dimensional entity model, and completed thewhole machine of the three-dimensional entity unit model, design for assembly is realized.
keywords The Snowplow machine; UG NX10.0; 3D design; Design calculation
目录
摘要II
Abstract III
1绪论1
1.1选题的意义1
1.2国内外的发展状况与趋向1
1.2.1国内发展状况1
1.2.2国外发展状况2
1.2.3发展趋势3
1.3扫雪途径及其应用范围4
2路面积雪性质的研究5
2.1积雪的物理性质5
2.1.1雪的密度6
2.1.2积雪的湿度7
2.2积雪的力学性能7
2.2.1积雪的硬度7
2.2.2积雪的摩擦系数7
2.3本章小结8
3微型全自主扫雪机器人机械结构设计9
3.1总体结构设计方案及其比较9
3.2微型全自主扫雪机器人的工作原理9
3.2.1基本结构9
3.2.2工作原理9
3.3本章小结10
4行走装置的设计计算和校核11
4.1设计方案11
4.1.1结构组成11
4.1.2工作原理及工作过程12
4.2履带行走装置动力方式的选择12
4.2.1履带行走装置牵引力的计算12
4.2.2履带行走装置原动机的选择14
4.3履带行走机构关键部件的设计及选择16
4.3.1履带的设计及选择16
4.3.2驱动轮的设计及选择17
4.3.3驱动轴的设计及计算校核18
4.3.4导向轮,拖带轮,支重轮的设计及选择20
4.3.5履带行走机构螺栓的选择与校核22
4.4本章小结23
5推雪装置的设计计算和校核24
5.1推雪板的设计24
5.2铲刃的设计25
5.3链接装置的设计25
6扫雪装置的设计计算和校核27
6.1扫雪装置的设计27
6.2扫雪装置的计算与校核28
6.3刷毛的选择30
7三维建模与装配及运动仿真31
7.1 UG NX 10.0功能介绍31
7.2 UG NX 10.0建模方法介绍31
7.3 UG NX 10.0用户32
7.4 UG NX 10.0装配建模35
7.5 UG NX 10.0运动仿真36
参考文献37
致谢40

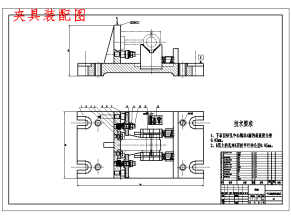
扫雪机器人装配图

驱动轮零件图

驱动轴零件图

设计目录1

设计目录2.

设计字数统计

英文摘要

中文摘要















")
SW模型")







