

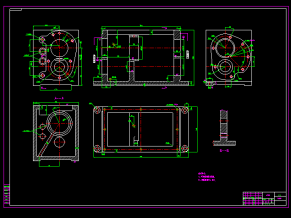
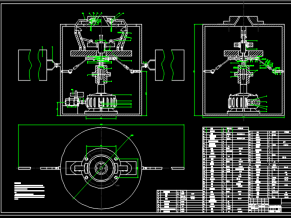
二维装配图
随着现代化的发展,人工智能技术和自动化技术已在各个领域进行应用。未来将有越来越多的自动化设备代替人工劳动。地面清洁长期以来一直是校园环境的一个重要问题,其工作环境恶劣,劳动强度大,所需人工成本高。因此,发展垃圾拾取机器人是校园的重要问题。
拾取机器人是一种应用型机器人,具有很强的适应性能力,适用于多种场合,具有结构简单,原理通俗,工作范围广等特点。本次设计的垃圾拾取机器人,我选用了Z2系列直流电动机,并通过齿轮和轴以及键之间的配合,完成了大臂相对于肩部的旋转,小臂相对于大臂的旋转,手腕相对于小臂的旋转以及摇摆,以及手掌的张合。并且设计的臂部与手部采用了大量的标准件,这样也极大的减少了设计制造成本。在材料的选择上,选取了轻型材料,通常用来制造铝合金的铝铜合金,这样可以降低设计中受压部件所承受的压力,提高机器人臂的使用寿命。

零件图

目录

说明书


















模型")



")
SW模型")
