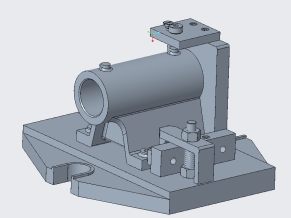
A总装图
摘要
本次的设计来源于工业机器人夹持器机构更新换代基础之上,通过设计出工业机器人夹持器,从而来满足当今工业机器人组成机构之一的夹持器各方面性能不足的缺陷。本设计课题来自于企业的生产实际,通过设计出新型工业机器人夹持器,从而来掌握工业机器人夹持器的整个设计生产流程,培养工程意识。
我国生产的工业机器人夹持器从仿制开始起步,近期产品的质量较早期有所提高。但受国产配套件质量及设计水平等的影响,我国目前生产的工业机器人夹持器的总体水平与进口产品及港口用户的要求仍有较大差距,工业机器人夹持器的生产也是如此,为满足市场需求,开发出一种新型的工业机器人夹持器势在必行!
本文通过运用大学所学的知识,提出了工业机器人夹持器的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了工业机器人夹持器总的指导思想,从而得出了该工业机器人夹持器的优点是高效,经济,并且安全系数高,对提高工业机器人的工作效率,减少人工投入,增强夹持质量等等起到了很大的作用的结论。
关键词:工业机器人夹持器;高效;人工投入;结论
目录
1绪论1
1.1课题的来源与研究的目的和意义1
1.2工业机器人的组成2
1.2.1工业机器人的组成3
1.2.2工业机器人的分类4
1.3国内外发展状况5
1.4工业机器人的成本与人工成本的比较6
1.5工业机器人的作用8
2工业机器人的设计方案10
2.1座标型式与自由度的设计12
2.2手部结构方案的设计14
2.3手腕结构方案的设计15
2.4手臂结构方案的设计16
3工业机器人夹持器结构的设计18
3.1夹持式手部结构20
3.1.1手指的形状和分类22
3.1.2设计时考虑的几个问题24
3.1.3手部夹紧气缸的设计26
3.2气缸驱动力矩的计算28
3.3气缸驱动力矩的计算校核29
4工业机器人夹持器中关键零部件的强度计算与校核30
4.1齿轮的强度计算与校核32
4.2轴的强度计算与校核33
结论34
致谢35
参考文献36

字数

小齿轮

弹簧

手指

摘要

气缸体

气缸前端盖

活塞

活塞杆

目录

设计所包含文件

轴

齿轮
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!