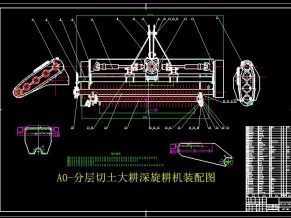
A0-机械臂装配图
本设计是对移动机器人机械臂进行设计并完成机械臂的碰撞检测。根据三动杆定理设计出了具有3个自由度的移动机器人机械臂。移动机械臂的设计主要有材料的选择、内部传动机构的设计、电机的选型计算与控制以及各零部件的校核。材料主要以质量轻强度大的硬铝合金为主。手部、肘部与肩部的传动副分别是直齿圆柱齿轮与左右螺旋轴传动副、直齿圆锥齿轮传动副和蜗轮蜗杆传动副。电机选择了步进电机与直流无刷电机。运动控制部分是利用DSP及FPGA来实现多个伺服电机的协调控制。主要校核了齿轮、轴、蜗轮蜗杆等零部件的强度。电机机械臂碰撞检测所采用的是基于包围盒的碰撞检测方法。

A1-肩部箱体

A2-大臂

A2-肩部回转臂

A2-小臂

A2-肘部回转臂

A3-肩部花键轴

A3-肩部蜗杆

A3-肩部直齿圆柱齿轮

A3-肩部轴承端盖

A3-蜗轮

A3-肘部旋转连接件

A3-肘部旋转轴

手部内部三维图

移动机器人的机械臂三维图

肘关节内部三维图