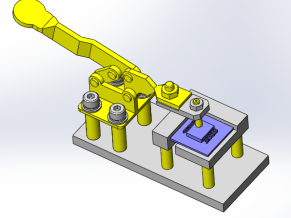
轴测图
目的动作 以均匀荷重压着临时粘接于平坦面的密封垫的工序 临时粘接了密封垫的工件被机器人投入至本工件,通过弹簧荷重以均匀荷重压着 压着后,通过机器人排出工件 环境操作性 与平坦面进行一次面接触,以便向固定工件粘接密封垫、节省空间和缩短时间
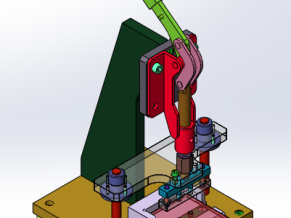
侧视图
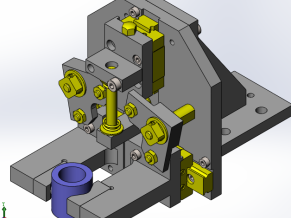
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:


















")

")
3D模型图纸Solidworks设计")





