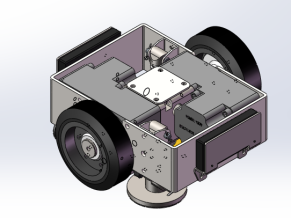
轴测图
目的动作 将工件投入2个滚轮之间,利用滚轮的R形状实现向中心搬运 小型输送机入口附近的接近传感器检测到工件,小型运输机开始运作,搬送到下一个工序 环境操作性 工件由人投入 工件的直径为φ25~φ40,不需要调整2个滚轮的位置 但是传感器的高低以及通过线的高低需要调整 工件是利用自重在滚轮上滑动。滚轮倾斜角度用螺栓即可设定 倾斜角度:7~13[°]
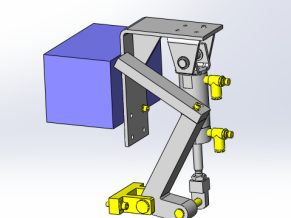
侧视图
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:























")




