

5.前场球
"一种有助于显着改善羽毛球的发球效果、提高发球效率、便于对击球角度依需调节而藉以满足在前场球和平击球以及后场球三种击球模式中进行选择变换的要求并增进练习者的综合习球技能、有益于显着简化载球喂球机构的结构而藉以方便制作与装配并且体现经济廉价性的羽毛球自动发球机器人。共有四个球桶,每个球桶装载20个球,当某一个球桶内的球击打完后,球桶顺时针转过90°下一个球桶继续供球,球桶底部开有四个卡槽孔与转盘上的四个凸柱互相配合,用于固定球桶。用拨球滚轮拨落球桶内探出球,拨球滚轮由步进电机带动,每转动一次暂停5秒使球不连续掉落,使球拍有击打时间。球拍顶部装有视觉传感器,捕捉到下落的球时,控制系统发送信号给球拍的驱动电机,驱动电机转动一圈带动球拍击打羽毛球的球头部分使之做抛物线运动,根据羽毛球的自由落体速度,计算羽毛球从球桶落出到球拍击打位置之间的时间,经过建模精确仿真达到要求,运用视觉传感器更是加大了容错率,击打准确率大大提高,击打完成后球拍回到起点位置等待下次击打,依次循环进行工作。
"

6.平击球

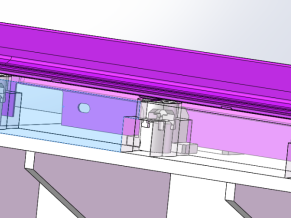
1.滑轨

2.PLC控制电路

3.麦克纳姆轮

4.对支架的有限元分析

7.后场球

8.结构展示图1

9.结构展示图2

10.爆炸图

11.效果展示图1

12.效果展示图2





















图纸")


