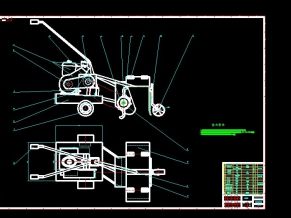
三维模型
本机械手的机械结构主要包括硅片原料定位机构设计,拾取吸盘运动机构(x、z方向),运料吸盘运动机构(x、y方向);其动作转换靠设置在各个不同部位的传感器产生的信号传输到PLC控制器,通过PLC内部程序输出不同的信号,从而驱动外部线圈来控制电动滑台或电磁阀产生不同的动作,
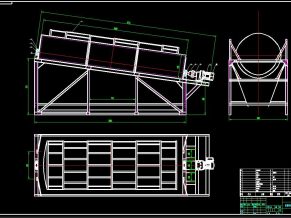
总装图
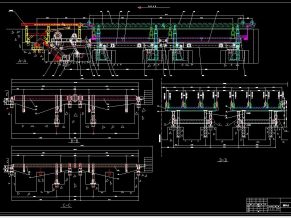
零件图明细
文件预览
字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:






















")



")

")
")